导 语
近期,由韩国科学技术院电气工程学院的 Jae-Woong Jung 教授和韩国科学技术院机械工程系的 Jung Kim 教授领导的联合研究小组于 1 月 23 日宣布,他们已成功开发出可以以高水平电感应生理信号的可拉伸和粘合的微针传感器,且该传感器使用过程中不受用户皮肤状态的影响。相关成果发表在《Science Advance》上。
1、研究背景
对于可穿戴机器人来说,要识别人类运动背后的目的并用于康复治疗,需要可穿戴的电生理传感器来提供精确的肌电图。然而,现有的传感器通常会随着时间的推移显示出信号质量恶化的情况,并且极易受用户皮肤状况的影响。此外由于传感器接触表面无法跟上皮肤的变形,具有较高机械硬度的传感器会产生噪音。这些缺点限制了可穿戴机器人的可靠性以及使用者对机器人的长期控制。
2、研究概述
基于功能化导电聚合物的设计,研究团队设计了功能化聚苯胺基时序黏附水凝胶贴片。它可以实现心脏的同步机械生理监测和电耦合治疗,并牢固附着在心脏表面监测心脏的机械运动和电活动。
研究小组推出了一种可拉伸的微针粘合贴片(stretchable microneedle adhesive patch,SNAP)。该贴片具有柔软、可粘合和组织适应性的特点,能够在无需皮肤准备的前提下,确保长期可靠的电生理(Electrophysiological,EP)信号记录。SNAP具有蛇形互联的可拉伸部件,可以适应动态的皮肤组织,有助于提高长期佩戴舒适度。在可拉伸互联件下方加入了硅微针阵列,使其能够穿透角质层与表皮直接接触但不会到达痛觉感受器所在位置。这种设计有助于高质量的EP信号采集,而且避免了疼痛与备皮。此外,包含银拨片和高粘性有机硅的导电粘合剂不仅通过提供额外的导电通路来增强电极-皮肤界面,还确保传感器在使用过过程中与皮肤的牢固粘附。
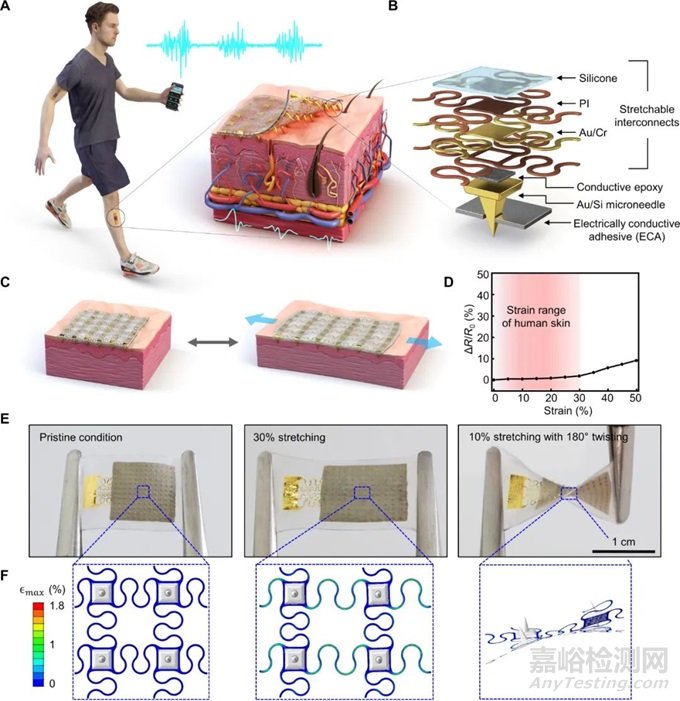
图1 SNAP 的设计和工作理念。( A ) SNAP 的整体系统配置和应用示意图。该贴片式设备集成了皮肤适形SNAP,无论皮肤状况如何,都能够进行可靠、长期的 EP 信号监测。插图显示了柔软的组织适应型 SNAP 的特写视图,该 SNAP 使用微针穿透角质层以直接进入表皮。 ( B ) SNAP 的分解示意图,由可拉伸蛇形互连、镀金硅微针和由银片-硅复合材料制成的导电粘合剂组成。 ( C ) SNAP 的示意图,突出显示其适应组织拉伸的能力。 ( D ) SNAP 的相对电阻变化作为拉伸应变的函数。当 SNAP 受到 30% 拉伸时,其电阻变化可以忽略不计,这对应于人体皮肤的最大拉伸范围 (8 .49)。这凸显了其在拉伸变形下保持稳定电测量的能力。 ( E ) 光学图像显示 SNAP 的高机械顺应性:(左)原始状态;(中)30% 拉伸;(右)180° 扭转 10% 拉伸。 ( F ) SNAP 的有限元建模,其变形配置对应于 (E) 中所示的配置。
通过一系列研究,研究小组全面测试了 SNAP 的材料、机械和电气特性,证实了它们在各种条件下进行高度可靠的长期 EP 信号监测的潜力。有限元分析结果以及与其他类型 EP 传感器(例如柔性微针电极和凝胶电极)的实验比较表明,由于SNAP具有弹性和渗透性,这种传感器显著降低了皮肤变形过程中的组织应力,并提高了信噪比。外骨骼机器人闭环操作的概念验证演示凸显了免备皮无线 SNAP 系统的可靠性,展示了其在人机界面应用中的潜力,允许佩戴者快速、无缝设置和自由活动。
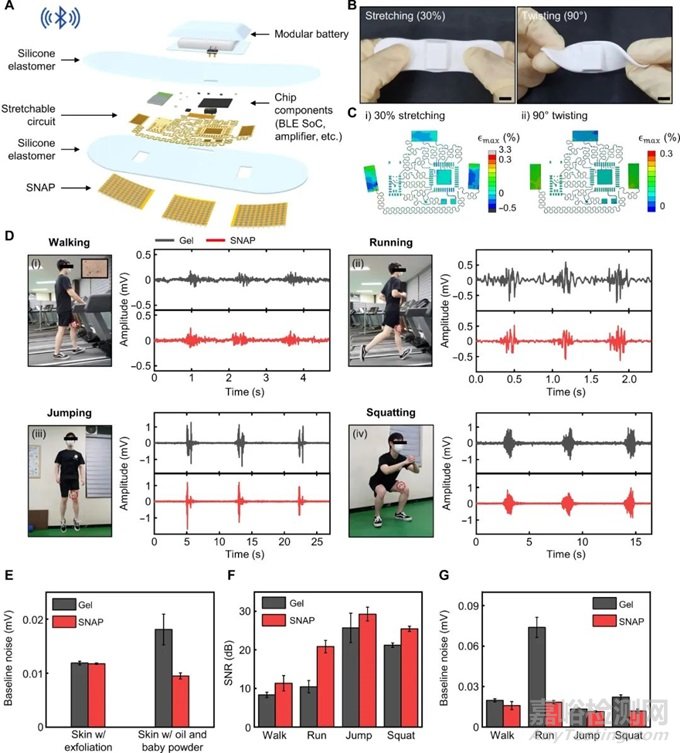
图2 无线SNAP系统在各种步行运动期间的肌电图监测性能 ( A ) 无线 SNAP 系统的分解示意图。该无线系统由 SNAP、用于无线 EP 记录的可拉伸电路、封装有柔软、生物相容性弹性体的可拆卸锂电池组成。( B ) 在拉伸(ε = 30%;i)和扭转(90° 扭转;ii)过程中拍摄的设备照片。( C ) 对应于 (B) 的变形情况下的装置的有限元模拟结果。( D ) 显示不同类型的动态运动及其相应的 EMG 记录的图像,使用与凝胶电极(灰色图)和 SNAP(红色图)集成的贴片型设备进行记录。人类受试者执行四种类型的步行运动:(i)行走、(ii)跑步、(iii)跳跃和(iv)蹲下,目标肌肉是股内侧肌。( E到G )记录的EMG信号质量图,包括预处理和污染皮肤状况 (E) 的基线噪声幅度、信噪比 (F) 和四种动态运动的基线噪声幅度 (G)。
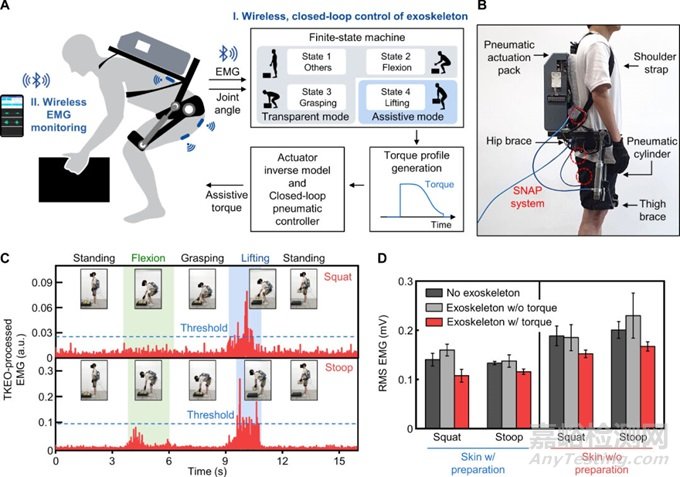
图3 演示无线SNAP系统用于外骨骼机器人闭环控制的人机交互界面。( A ) 图示描述了外骨骼机器人的系统架构和控制策略。连接到下肢肌肉的 SNAP 系统将肌电信号无线传输到外骨骼机器人控制器以触发辅助操作。连接到背部肌肉的另一个 SNAP 系统可监测肌肉活动,以评估机器人辅助性能。( B )气动背部支撑外骨骼系统的硬件配置。气缸的线性驱动使该装置推动躯干,产生辅助髋关节扭矩,以举起沉重的外部负载。SNAP 系统连接到 L1、GM 和 BF 肌肉,用于操作外骨骼机器人并验证其辅助性能。( C ) 在深蹲举重(顶部)和弯腰举重(底部)的单个周期中实时测量触发肌的TKEO-EMG信号。( D ) 和没有机器人辅助的 RMS EMG 比较。当使用机器人辅助时,无论是否备皮、出汗水平如何,背部肌肉活动都会大大减少(预处理的皮肤和未预处理和出汗的皮肤条件下平均减少18.1%)。
3、研究意义
这项工作探讨了 SNAP 免备皮长期 EP 信号监测的概念和设计策略。SNAP 的刚软混合结构具有独特的功能,例如通过角质层直接进入表皮和组织顺应性。这些特性不仅确保了对皮肤分泌物和污染的高度免疫力,而且还提供了长时间使用的舒适性。与商用凝胶电极相比,具有导电粘合剂的SNAP由于其高导电性和粘合性,提供了更为优异的皮肤传感器界面,体现为运动伪影和基线噪声减少。外骨骼机器人与 SNAP 系统的无线闭环操作演示进一步验证了该设备在复杂的真实人机交互应用中的实用性。
为了推广应用,需要研究适合大规模生产的新材料和更简单的制造方法,以降低与当前依赖于微机电系统工艺的制造方法相关的成本和复杂性。此外,开发带有刚度可调节微针的可拉伸电极,这种电极是刚性的,便于皮肤穿透,然后变得柔软以适应组织,这对于完全消除微针-皮肤界面的机械不匹配,确保长期舒适感至关重要。
参考文献:
Heesoo Kim et al.Skin preparation–free, stretchable microneedle adhesive patches for reliable electrophysiological sensing and exoskeleton robot control.Sci. Adv.10,eadk5260(2024).DOI:10.1126/sciadv.adk5260
来源:BME康复工程分会
关键词:
微针传感器