嘉峪检测网 2024-12-18 08:27
导读:本文介绍了LLC动态性能分析。
1. LLC动态指标
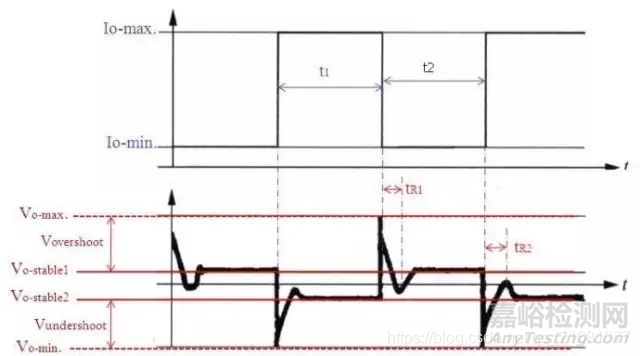
这里的LLC动态是指LLC电路在突加负载时的动态响应。一般用输出电压的下跌和过冲评判LLC动态性能。
2. LLC动态过程
当负载空载运行时,突加负载,此时输出电压下跌,之后在控制调节的用作下恢复。以下分阶段描述。
1、第一个阶段
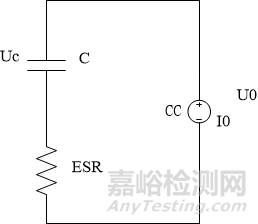
在加载时,当负载为恒定电阻载时,在加载时负载模型如图所示:
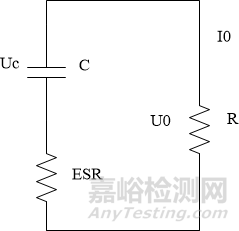
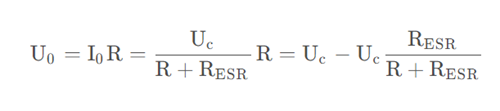
因此,在加载时,因为ESR的原因,输出电压会有下跌,下跌电压UcRESR / ( R+RESR)
其中,ESR(Equivalent Series Resistance)为输出电压的等效串联电阻,一般很小,常常该指标作为评判电容好快的重要指标之一。然后在很多电容的数据手册中,并没有明确标出该指标。
当ESR远远小于R时,完全可以忽略。而不满足远小于的条件时不能忽略。
电容的ESR和温度有关,尤其是对于铝电解电容,在低温下,ESR会变得比常温下大。
在加载时,负载为恒电流载时,
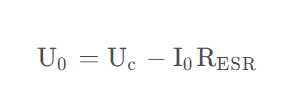
因此,在加载时,因为ESR的原因,输出电压也会有下跌,下跌电压I0RESR 。ESR越小,下跌越小。
2、第二个阶段
输出电压持续下降阶段,该阶段持续到LLC响应时刻。此时的等效模型为:
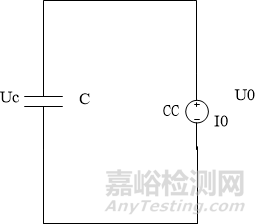
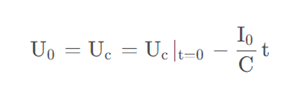
上式可得,当输出电容越大,负载电流越小,U0下降的越慢。
由于控制的存在,当系统开始响应时,该阶段结束。
第一个阶段加上第二个阶段的时间就是动态的响应时间。一般需要响应时间越快要好,越快响应,下跌越小。
3、第三阶段
第三阶段为恢复阶段。对于调频控制来说,开关频率从空载频率开始变换。从恢复阶段开始,输出电压下降的速率越来越小,一直到下降到下降速率为0,然后输出电压开始恢复上升。
4、第四阶段
在该阶段,输出输出电压恢复上升,但由于**的原因,输出电压会保持在较低于空载输出电压的电压。
5、第五阶段
当负载电流忽然变小时,或者忽然卸载时,输出电压会上冲。由于采样的延迟,调节需要时间,当控制开始响应时,输出上升的斜率变小,一直变小到0,然后开始恢复,但会恢复到略高于空载电压的电压。
3. LLC动态性能分析
从控制的角度分析,动态过程分为响应过程和调节过程。想要有好的动态性能,响应时间和调节时间均要短。
其中,响应时间、调节时间和输入输出条件、LLC参数、信号采样及控制参数有关。
3.1 信号采样
采样延迟
在实际布板中,考虑到诸多因素,采样信号的位置也不相同,同一信号的不同采样位置也可能导致信号的延迟和延迟程序的不同。
为了进行采样信号的匹配,一般会有运放电路,运放电路也有延迟,影响运放电路的有电容和运放的压摆率。
由于在实际中,干扰是必不可免的,因此需要对信号进行滤波,而滤波会带来信号的延迟,滤波分为硬件滤波和软件滤波。
采样延迟分析
延迟不可避免,当延迟大时,响应时间变长。
而调节时间变换规律不明确,因为当响应时间变长,则在响应时,输出电压下跌更多,这时,进行调节,输出电压误差变大,能更快调节到需要调节的量,调节时间变短;调节时间变大,另一方面,输出电压下跌更多。
3.2 输入条件
这里的输入条件有母线电压。
母线电压
当母线电压不同时,满载运行时开关频率不同。在突加载时,当开关频率同从200kHz变到满载运行频率,所需的时间也不同,输出电压下跌的程度也不同。
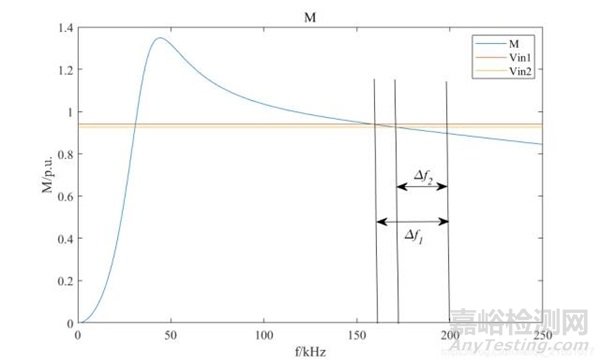
如上图所示,当输入电压较高时,Vin2 > Vin1,对应的满载频率f2 > f1,Δ f2 < Δ f1,则母线电压高时,输出电压下跌小。
3.3 本身参数
这里的参数包括,LLC参数、变压器参数和输出电容。其他参数不是主要影响因素,只要在合理范围内即可。
3.3.1 谐振电感L
谐振电感影响着LLC的Q值。
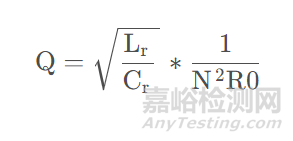
其中,Cr为谐振电容,N为变压器砸比,R0为输出等效电阻。
Q和增益曲线相关,增益曲线越陡,控制精度越差;增益曲线越缓,调节困难,并且降低LLC的增益范围。因此,曲线既不能太陡,也不能太缓。
当Lr变大,Q变大,LLC增益曲线变得更陡,则增加了LLC的频率变换速率。但是此时同一输入输出下,稳态的频率更小,需要更长的频率调节。综合来说,单纯的更变谐振电感,对动态性能时改善还是变差,需要具体的数值定量计算,无法定性分析。
3.3.2 变压器变比
在LLC参数确定之后,如果变压器变比变化,也会引起动态性能的变化。
当变压器变比变大,而输入输出电压不变,因此LLC的稳态增益变小,LLC的稳态工作频率变大,因此动态性能将优于变化之前的。
但是变压器变比不能一直变大,会引起纹波问题,并且LLC的频率整体变大,驱动变压器热增大,不利于电源效率等指标,甚至有炸机风险。
3.3.3 k值
k值越小,增益曲线的斜率越大,在实现同增益变化量的情况下,其开关频率的改变范围越小,易于磁性元件的优化设计。而在谐振频率一定时,K值越小,励磁电感Lm越小,励磁电流越大,增加了电路的损耗。
3.4 控制
常用的控制为PI控制。传函表达式为:

其中,Kp为比例系数,Ti为积分系数。
Kp越大,响应越快,可以改善动态性能。但过大会引起振荡。
减小Ti在一定程度上也可以增快响应,改善动态。但是太小也会振荡。

来源:Internet
关键词: LLC动态