人工肌肉纤维具有广阔的应用场景,涵盖智能织物、人形机器人(假肢)、机械外骨骼以及增强现实等。如何低成本批量制备出高性能人工肌肉微纤维,是科学家一直以来追求的目标。液晶弹性体(LCE)这种智能柔性材料因其具备大尺度可逆形变、响应力学输出强、形变可编程等突出优点,被业界公认为制备人工肌肉的理想材料。早在1975年,诺贝尔物理学奖得主Pierre-Gilles de Gennes教授就预言LCE非常适合用于制造人工肌肉。在过去的二十年中,熔融拉伸法、微流体法、直写式3D打印法、静电纺丝法等方法相继被开发出来用于制备纤维状LCE。但这些方法都无法连续、高速制备高性能的LCE人工肌肉微纤维。
受到自然界中蜘蛛液晶纺丝原理的启发,西湖大学智能高分子材料团队创造出一种连续、高速纺丝制备LCE纤维的新方法,制造速度可达8400 m/h(已报道的最高制造速度为~5000 m/h)。相关研究工作以“Bioinspired Liquid Crystalline Spinning Enables Scalable Fabrication of High-Performing Fibrous Artificial Muscles”为题在Advanced Materials期刊发表。西湖大学智能高分子材料团队博士生侯文浩为论文第一作者,博士生王蛟为第二作者,吕久安研究员为通讯作者。
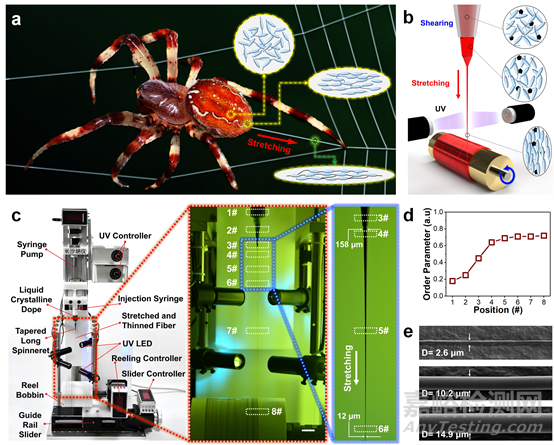
蜘蛛采用了一种不同寻常的液晶纺丝工艺,工艺借助了喷丝前蜘蛛体内漏斗形导管的内部牵伸变细与喷丝后通过外部机械拉伸进行牵伸变细相结合的多级液晶纤维细化成型和取向技术(图1a)。根据蜘蛛液晶纺丝多级成型和取向原理,研究团队开发了在温和加工条件下连续、高速加工高性能LCE人工肌肉微纤维的新技术(图1b),可实现高性能LCE微纤维人工肌肉的规模化生产(图1c)。所制备的人工肌肉微纤维(图1e)展示出了各项优势,包含快速形变(驱动应变速率高达810 %/s,而已报道的最大应变速率为350 %/s)、强力学输出(驱动应力高达5.3 MPa,人类骨骼肌的驱动应力为~ 0.3 MPa)、高功率密度(高达20440 W/kg,而已报道的最大功率密度为~400 W/kg)、高频率响应(50 Hz,常规LCE响应频率 <1 Hz)、高机械可靠性(250000次形变循环后无明显疲劳)。
图1. 基于蜘蛛液晶纺丝原理的人工肌肉微纤维加工新技术。a) 蜘蛛液晶纺丝原理。b)高速连续液晶纺丝示意图。c)高速连续液晶纺丝设备以及纺丝过程的局部放大图片。d)高速连续纺丝过程中液晶取向度的变化曲线。e)利用高速连续纺丝方法制备的LCE人工肌肉微纤维的扫描电镜照片。
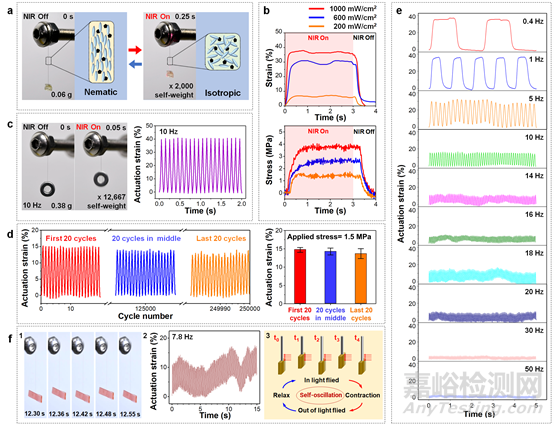
如图2a所示,当LCE微纤维(直径33 μm)受到NIR光(1000 mW/cm2)照射时,其沿着轴向收缩,在0.25 s内长度变化为37%,向上拉动了比自身重2000倍的超重载荷。通过改变光照强度,可以调节微纤维的致动应变和应力,最大应力可超过3.8 MPa(图2b),比人体骨骼肌的致动应力(0.35 MPa)至少高出一个数量级。直径约为3 μm的微纤维可在0.1 s内产生高达5.3 MPa的驱动应力。直径为33 μm的LCE微纤维可以在10 Hz的频率下可实现40 %的形变(图2c),驱动应变速率高达810 %/s(图3),功率密度最高可达20440 W/kg。人工肌肉在外部负载下的长期驱动耐久性是实际工程应用的关键性能。LCE微纤维(直径82 μm)可以以8 Hz的频率进行长期周期性的升降负载铜块(0.8 g,施加拉力约1.5 MPa),且在25万次循环之后,无明显的材料疲劳现象(图2d)。使用数控斩波器来精确控制NIR照明的开关频率,LCE微纤维可以实现50 Hz的高响应频率(图2e)。在不借助光斩波器时,LCE微纤维依靠自身的光机械反馈回路可以实现持续的自动循环运动,运动频率可达7.8 Hz(图2f)。
图2. LCE微纤维优异的驱动性能。a)当用近红外光照射LCE微纤维时,纤维沿纵向收缩向上拉动载荷。b)通过改变光强度,可以调节LCE微纤维的驱动应变和驱动应力。c)直径为33μm的LCE超细纤维在10Hz频率下可快速上下拉动重物(0.38g,比超细纤维重12667倍),驱动应变化达40%。d)在25万次循环之后,LCE微纤维可没有产生明显的材料疲劳现象。e)LCE微纤维在不同频率的NIR光照射下的驱动性能。f)LCE微纤维可以将恒定的NIR光照射激转换成连续的自振荡运动。
图3. LCE微纤维以10Hz频率快速上下提拉是其自身重量12667倍的重物。
基于微纤维优良的驱动性能,微纤维能够适用于多样化的仿生驱动应用场景。利用微纤维束制备人工咬肌,能够模拟咀嚼的动作,将食物咬断。采用微纤维束模拟人工肱二头肌收缩功能,可以实现小臂上抬的动作,将重物举起。同样,由微纤维束制备的人工股四头肌可以实现模拟踢腿的动作(图4)。此外,LCE微纤维还适用于小型机械装置的驱动。图5展示了微纤维驱动的光控微镊,它的尺寸只有3.2毫米左右,结构紧凑并完全由近红外光驱动。光控微镊可在0.48秒内实现快速闭合或打开。通过LCE微纤维的驱动的仿生翅膀,运动频率可达10赫兹,接近自然界中蜻蜓翅膀的运动频率(8 - 15 Hz)(图6)。
图4. LCE微纤维作为人工咬肌、人工肱二头肌和人工股四头肌驱动多种仿生运动。
图5. LCE微纤维驱动的微型光控镊子可在0.48s内完成闭合。
图6. LCE微纤维驱动的仿生翅膀以10Hz频率快速扇动。
总结而言,这种可批量制备高性能人工肌肉微纤维的新技术将有力推动小巧、强劲、灵活的软机器人、可穿戴设备、微型驱动装置、仿生机器人等高新前沿领域的发展。
来源:高分子科学前沿
关键词:
人工肌肉微纤维