嘉峪检测网 2024-09-03 13:23
导读:本文基于热力学模型推导空气弹簧的弹性力,利用分数阶描述橡胶气囊的黏弹性阻尼力,以此修正热力学模型与工程实际中空气弹簧的差异,通过实验验证了模型的准确性。
[摘要]电控空气悬架系统(electrically controlled air suspension,ECAS)具有调节悬架刚度和车身高度的功能,可有效改善车辆乘坐舒适性和操纵稳定性。以某乘用车ECAS为对象,利用分数阶理论描述橡胶气囊的黏弹性阻尼特性,考虑等效阻尼及滞回特性对其热力学模型进行了优化,结果与实验数据吻合良好,验证了优化后的空气弹簧模型的精确性。在此基础上,考虑车辆纵横向动力学特性与Dugoff 轮胎模型,建立14 自由度整车ECAS 动力学模型,提出模型预测(model predictive control,MPC)主动悬架控制方法,以可测变量为控制器输入,实现直线及转向行驶工况下的主动控制。仿真与整车台架实验研究表明,分数阶修正模型可以很好地反映ECAS 变刚度特性,基于MPC 的主动悬架控制策略能实时调整空气弹簧刚度,控制车身姿态,有效改善电动汽车行驶时的平顺性与稳定性。论文的研究方法为车辆悬架系统建模及主动控制提供了一种新思路。
关键词:空气悬架;热力学;黏弹性阻尼;分数阶;模型预测控制
前言
随着电子技术的发展和制造成本的降低,电控技术在汽车行业得到了广泛应用,电控空气悬架系统(electrically controlled air suspension,ECAS)是其典型代表。作为当前最先进的悬架系统之一,ECAS能实时调节悬架刚度[1],具有更低的固有频率、更理想的非线性特性等[2-3],使得车辆能适应不同的路况、车辆负载和行驶速度,极大地改善了行驶性能,而如何准确、快速地调节空气弹簧刚度,成为当前研究的重点。
空气弹簧的刚度特性受气压、激励频率和幅值等诸多因素的影响,常见的空气弹簧的非线性模型有多项式模型及热力学简化模型。多项式模型一般采用三次多项式对空气弹簧刚度的幅频特性进行描述,冯霏等[4]、盛云等[5]都曾采用三次多项式,分别利用多尺度法、增量谐波平衡法等分析了汽车悬架系统的2 自由度非线性振动系统的振动特性。尹万建等[6]指出汽车系统中,空气弹簧刚度的频变现象并不明显,故可用三次多项式对空气弹簧刚度特性进行描述,但这类模型没有考虑橡胶气囊黏弹性特性的影响。热力学简化模型是应用最广的建模方法,将空气弹簧的力学模型分解为弹性力及黏性阻尼力两部分,其中黏性阻尼力存在非线性阻尼力以及惯性力,Zhu等[7]基于Berg模型增加了对空气弹簧摩擦特性的描述,提出摩擦力由减振杆和气缸之间的相对运动以及橡胶材料颗粒产生。邬明宇等[8]针对多腔室空气弹簧提出了一种考虑空气气囊热交换与阻尼滞回特性的力学模型,考虑滞回特性的精确解模型可以很好反映空气弹簧的动力学特性。Oda 等[9]研究建立了一种附加气室空气弹簧力学模型,具有一定的频率适应性。Docquier 等[10]研究了不同热交换系数对附加气室空气弹簧内部特性的影响,分析了传热对动态刚度的影响。陈俊杰等[11]将分数导数Maxwell中建立空气弹簧模型,用来描述橡胶气囊的黏弹性特性。目前,针对空气弹簧力学特性及其模型的研究较多,而将空气弹簧应用于整车动力学模型控制悬架系统的研究尚不多见。
主动悬架控制一直是研究热点,常见的控制方法有天棚控制[12-13]、最优控制[14-16]、滑模控制[17]及PID 控制[18]等。车辆在行驶过程中存有诸多不确定性,模型预测控制无须复杂的辨识过程,并且在优化过程利用实测信息不断矫正,对不确定性环境具有很强适应能力,因此,模型预测控制方法适合用于ECAS。同时,由于空气弹簧具有响应慢、时滞长等特点,目前多针对汽车行驶时的俯仰运动、侧倾运动以及车身高度控制等问题进行研究。Huo 等[19]提出将抑制俯仰运动的控制器作为补充控制模块,在特定工况下开启,并基于天棚控制设计PID 控制器控制俯仰角。Eltantawie 等[20]将半车模型分成两个独立的1/4 模型,对每个模型设计分散神经模糊控制,优化车辆的垂向响应与俯仰角。Chen 等[21]设计了一款有高流量软管的空气悬架系统,可改进货车在车道变化和稳态转弯时的操控性和稳定性。上述文献均取得了一定的成果,但多针对阻尼减振器[22]、油气悬架[23]等,将空气弹簧作为控制对象的研究尚不多见。此外,现有关于ECAS 研究多侧重于空气弹簧力学模型优化和车身高度调节等,涉及车辆行驶时侧向和纵向的车身姿态控制的研究较为少见。
鉴于此,本文基于热力学模型推导空气弹簧的弹性力,利用分数阶描述橡胶气囊的黏弹性阻尼力,以此修正热力学模型与工程实际中空气弹簧的差异,通过实验验证了模型的准确性。在此基础上,建立电动汽车整车ECAS 垂向动力学模型,并考虑纵横向动力学特性与Dugoff 轮胎模型,针对直线与转向行驶工况,以降低俯仰角加速度与侧倾角加速度为控制目标,搭建整车模型预测(MPC)控制器,并通过仿真分析和整车ECAS 实验验证了控制策略的有效性。
1、 空气弹簧力学模型与实验验证
1.1 空气弹簧力学模型
空气弹簧在工作过程中,气囊内气体为多变过程,气体质量固定时,理想气体多变过程方程有:

式中:p0 为静止状态时空气弹簧内部的绝对压力,Pa;V0 为静止时空气弹簧气囊内容积,m3;pe 为任意时刻空气弹簧内部的绝对压力,Pa;Ve为任意时刻空气弹簧气囊内容积,m3;k 为气体多变指数,绝热过程时k取1.4。
空气弹簧在充放气调节刚度的过程中,气体在气囊内流动时会有做功和焓变,一般充放气的时间较短,可视为绝热过程,根据热力学第一定律有[24]:

式中:W 为空气弹簧做功;hin、hout 分别为流入、流出空气弹簧的比焓;qin、qout 分别为流入、流出空气弹簧的质量流量;Uas表示空气弹簧的内能。
结合理想气体状态方程peVe= mRTe,式(2)可表达为

式中:R 为理想气体常数,R=287 J/(kg·K);Te 为气囊内气体温度;qm 为质量流量,qm= qin-qout;Cv 为定容比热容,Cv= R/(k -1)。
式(3)进一步整理为

空气弹簧运动过程中,有效容积及气囊内压作用力为

式中:Ae为空气弹簧有效承载面积,m2;z1、z2分别为簧上质量、簧下质量位移,m;Fk为气囊内压作用力,N。
三次多项式模型、热力学模型没有考虑空气弹簧橡胶气囊材料的黏弹性阻尼特性,然而空气弹簧在工作频率范围内,由橡胶气囊黏弹性产生的阻尼效应会影响空气弹簧的力学响应,因此采用分数阶微分对橡胶气囊黏弹力进行表达[25],以此修正热力学模型与实际空气弹簧之间的差异,空气弹簧力学模型对比如图1所示。
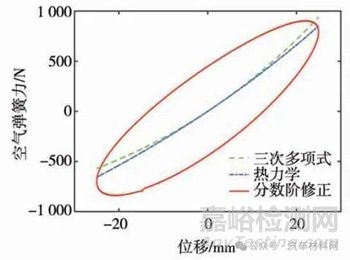
图1 空气弹簧力学模型对比
分数阶微积分的定义形式很多,但都较为复杂,一般采用传递函数G(S)逼近分数阶模型[26]。


1.2 空气弹簧力学特性实验
为了验证基于分数阶的空气弹簧力学模型的准确性,需要对空气弹簧的动特性进行实验。某空气悬架减振总成由空气弹簧和CDC 减振器串联组成,相关参数如表1 所示,将减振总成安装在振动台上,在减振总成上盖板与实验台架之间安装力传感器,如图2 所示。调节空气弹簧高度至226 mm,向空气弹簧充气达到初始压强后关闭气源。对空气弹簧施加正弦激励,振幅分别为10、12、15 mm 等,频率为0.2~1.5 Hz,记录力与位移数据。本实验目的是测试减振器总成中空气弹簧的力学性能,为了消除与其串联的CDC 减振器的影响,实验中还测量了相同工况下CDC减振器不通电时的阻尼力。
表1 空气弹簧力学实验参数
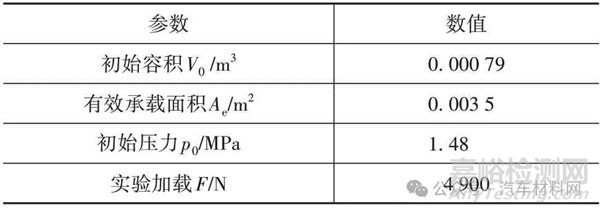

图2 减振器总成及空气弹簧力学特性实验
空气弹簧刚度和分数阶阻尼系数的计算方法如图3 所示。空气弹簧的刚度K 可由滞回曲线的最高点与最低点得出,滞回曲线的面积S=∫Fdx 为空气弹簧垂向振动过程中消耗的能量。
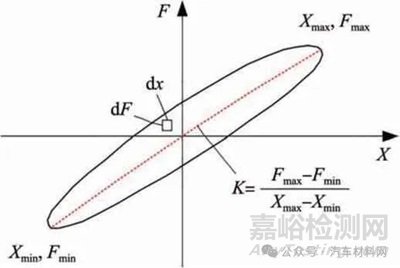
图3 空气弹簧滞回曲线
在消除CDC 减振器的影响后,得到空气弹簧的滞回曲线,调整仿真模型参数与实验工况一致,限于篇幅,通过仿真得出在载荷为4 900 N 时,仅呈现振幅为10、12 mm,频率f 为0.8、1.0 Hz 的正弦激励时的空气弹簧滞回曲线,如图4 所示,仿真与实验结果及其相对误差如表2所示。
表2 空气弹簧实验与仿真结果及相对误差
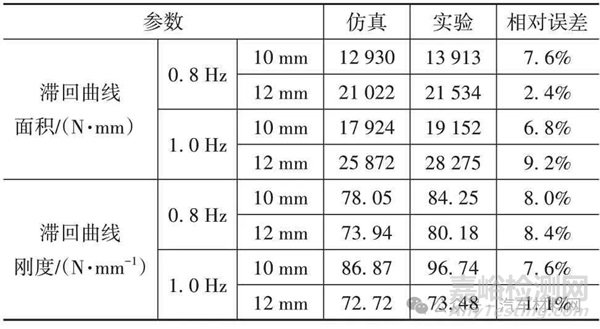
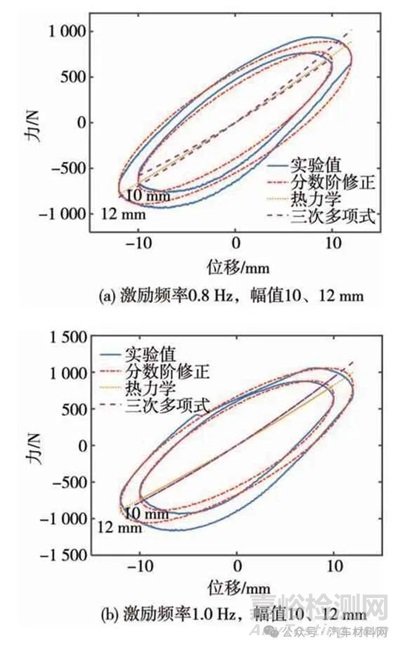
图4 空气弹簧滞回曲线实验与仿真对比
由图4和表2可知,仿真得到的空气弹簧分数阶力学模型滞回曲线与实验结果重合度较高,其中,滞回曲线面积S 与实验相对误差在10%以内,刚度K与实验结果相对误差在10%以内,同时,与三次多项式模型及传统热力学模型相比,经分数阶修正后的力学模型具有滞回特性,说明此模型能有效反映空气弹簧的力学特性,具有较高的精度,可满足工程实际应用需求。
2、 基于ECAS的电动汽车建模与仿真
2.1 纵横垂向耦合动力学模型
本文主要聚焦直线和转向行驶时的车身姿态,须考虑车辆纵横向运动与整车垂向力学模型的耦合,反映直线行驶急减速及转向工况下,车辆的纵向、俯仰与侧倾运动以及悬架动挠度、车轮转动等运动响应。考虑车辆纵向速度及前轮转角,将轮毂电机作为车轮的附加质量,建立电动汽车纵-横-垂向耦合的14自由度整车ECAS动力学模型,如图5所示。
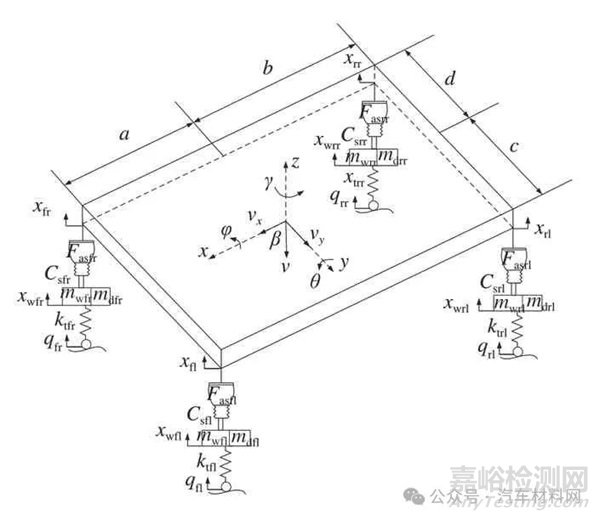
图5 电动汽车整车ECAS动力学模型
(1)车辆纵-横向动力学方程
车辆纵向、侧倾和横摆运动微分方程为


式中:δ为前轮转角;ax为纵加速度;vx、vy分别代表车辆纵向速度、侧向速度;m 为整车质量;Fx、Fy 分别为轮胎纵向力与侧向力;a、b 为质心至前后轴的距离;γ为横摆角速度;Iz为整车绕z轴方向的转动惯量;下标fl、fr、rl、rr 分别代表车辆左前轮、右前轮、左后轮和右后轮。
轮胎模型采用Dugoff 模型,轮胎受力如图6 所示,纵、侧向轮胎力为
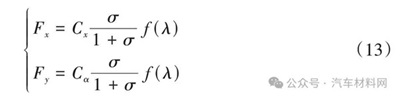
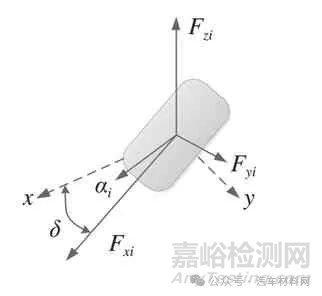
图6 Dugoff模型及其轮胎力
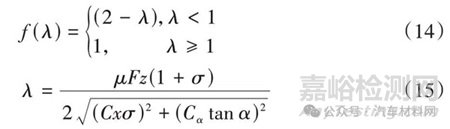
式中:σ 为滑移率;Cx、Cα 分别为轮胎纵向刚度、侧向刚度;λ 与路面和轮胎间摩擦因数μ 有关;α 为侧偏角;函数f(λ)为
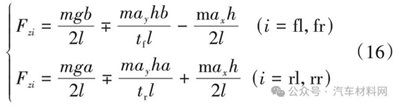
各车轮垂直载荷:
同时,各车轮的纵向力与侧向力均不能超出轮胎的附着椭圆方程:

各车轮侧偏角:
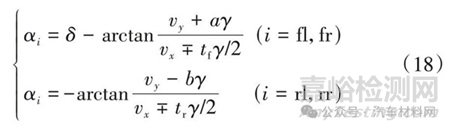
各车轮纵向速度:
车轮旋转方程:

制动时滑移率:

式中:tf、tr 为前后轴轮距;l 为前后轴距离;Fz 为轮胎垂向力;h 为质心高度;v 为车轮纵向速度;Jw 为车轮转动惯量;Tb、Td 分别为制动力矩与驱动力矩;ω 为车轮角速度;R为车轮半径。
(2)车辆垂向动力学方程
由牛顿第二定理和车辆系统动力学原理,簧下质量运动可表示为

式中:mw 为车轮质量;md 为轮毂电机质量;x 为车身4 个悬架连接处的位移;xw 为簧下质量的位移;kt 为轮胎刚度;qt 为路面激励;Cs 为减振器阻尼系数;Fas为空气弹簧力。
车身垂向、俯仰和侧倾运动表达式为
式中:ms为簧上质量;xs为簧上质量的位移;θ为俯仰角;φ 为侧倾角;c、d 为1/2 轮距;Fx 为制动力矩不为零时地面对车轮的摩擦力;Mθ、Mφ 分别为俯仰力矩与侧倾力矩。
2.2 仿真分析
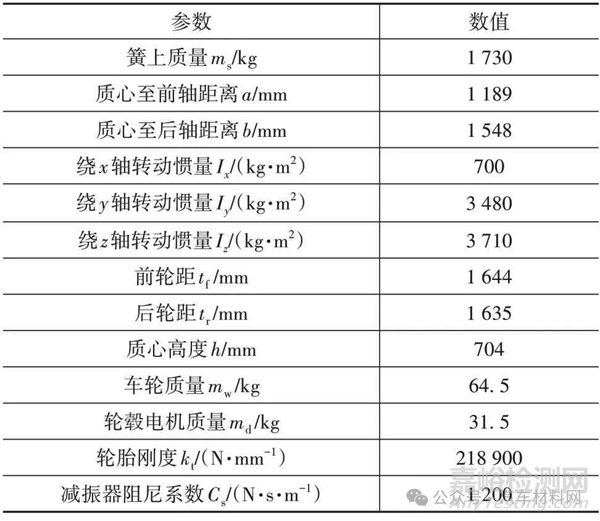
为了分析所建立的整车ECAS 模型能否有效反映车辆在行驶过程中的车身姿态变化,选取直线急减速和双移线转向工况分别进行仿真,车辆参数如表3所示。
表3 车辆参数
(1)直线急减速工况
车辆匀速直线行驶,第7 s开始减速,车速由120减速到60 km/h,车辆纵向减速度a 分别为3、2.5、2 m/s2,仿真结果如图7 所示,相同工况下分数阶与未考虑分数阶的ECAS 对车辆响应的影响,如表4所示。
表4 直线急减速工况分数阶模型对车辆响应的影响对比
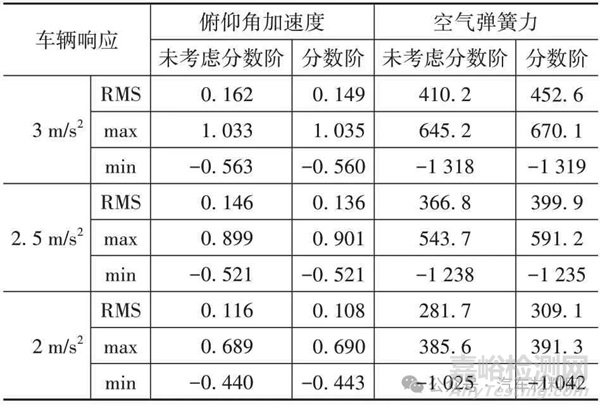
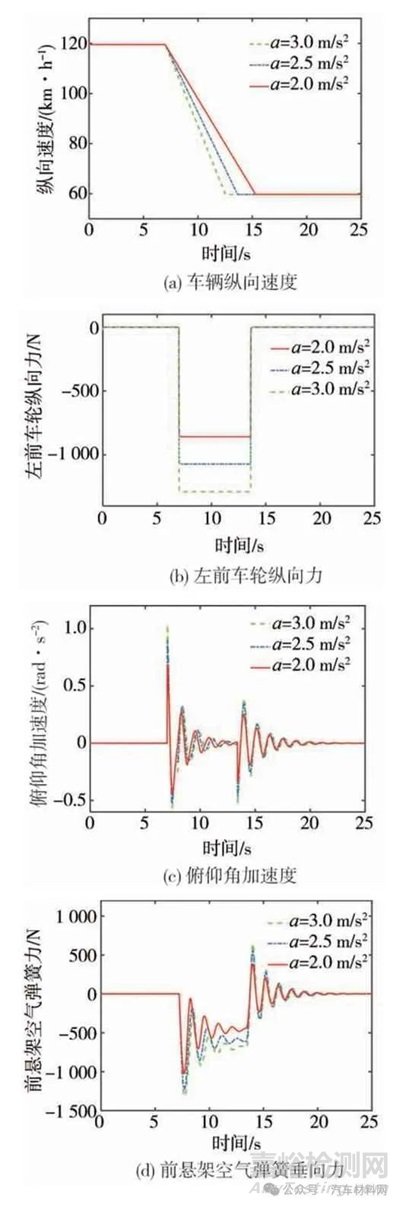
图7 直线行驶急减速工况仿真
由图7 可知,随着纵向减速度的增大,车轮纵向力、俯仰角加速度和空气弹簧垂向力都增加,车辆的平顺性与稳定性随之降低。在开始减速一瞬间,俯仰角加速度达到第1 个峰值,后逐渐稳定,这是因为急减速过程中制动力过大,导致车身俯仰角快速变化,在结束制动后俯仰角加速度出现了第2 个峰值,失去制动力后,由于空气悬架的作用,车身趋于平稳。由表4 可知,在纵向减速度分别为3、2.5、2 m/s2时,相比于未考虑分数阶,分数阶模型的空气弹簧力均方根值分别增加10.2%、9.0%、9.7%,俯仰角加速度均方根值降低8.1%、6.9%、6.9%,这是因为考虑了分数阶后,空气弹簧具有一定的阻尼特性,对减速时产生的俯仰具有一定的抑制。
(2)双移线转向工况
双移线转向行驶仿真,车速分别取60、75和90 km/h,第3 s 开始转向,转向过程约8 s,仿真结果如图8 所示。相同工况下考虑分数阶与未考虑分数阶的ECAS对车辆响应的影响对比如表5所示。
表5 双移线转向工况分数阶模型对车辆响应的对比
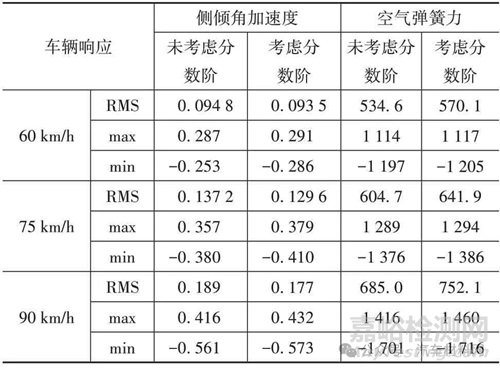
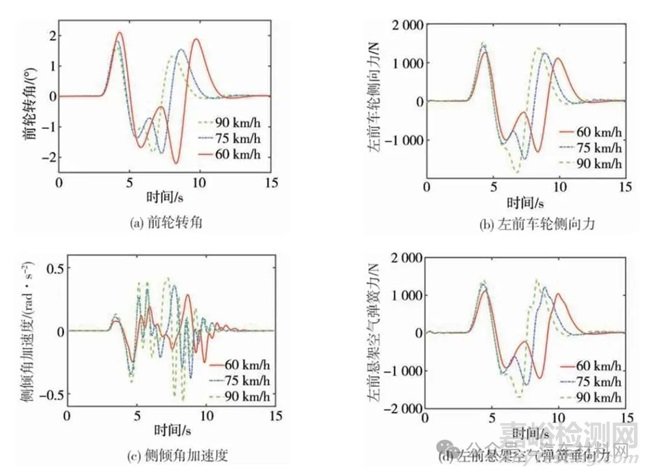
图8 转向行驶双移线工况仿真
由图8 可知,在双移线的过程中随着车速的增加,车侧向力、侧倾角加速度和空气弹簧力均增大,车辆的平顺性与稳定性降低。在开始变道时,侧倾角加速度达到第1 个峰值,这是由于车身侧向速度增加引起的,变更回原车道后,车身逐渐平稳。由表5 可知,在车速分别取60、75、90 km/h 时,考虑分数阶后,空气弹簧力均方根值增加6.7%、6.2%、9.7%,侧倾角加速度降低1.4%、5.5%、6.4%,与直线减速行驶工况的仿真结果一致。
综上可见,随着减速度与车速的增加,车辆的平顺性与稳定性降低。基于第1 节建立分数阶空气弹簧模型,通过纵-横-垂向整车ECAS 动力学模型分析,可以很好地反映车辆在直线行驶时不同减速度与不同速度转向行驶过程中的车身姿态及空气弹簧垂向力的变化,进一步验证了所建立的空气弹簧模型的有效性。在此基础上,可对其进行控制策略的设计与验证。
3、 模型预测(MPC)控制器设计及实验验证
模型预测控制(MPC)的控制动作是在每一采样瞬间通过求解有限时域开环的最优控制问题而获得,其控制流程如图9所示。
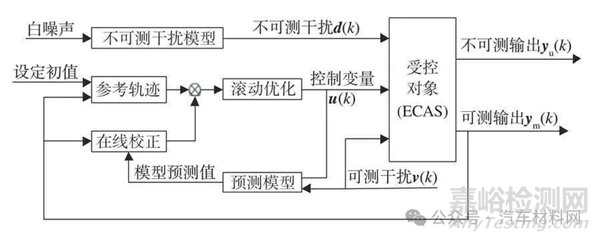
图9 模型预测控制器流程图
3.1 模型预测(MPC)控制器设计
为便于MPC 控制器的求解,对整车ECAS 模型进行线性离散化处理,处理后的状态空间方程可写为

其中:

式中A、B、C、D为状态矩阵。
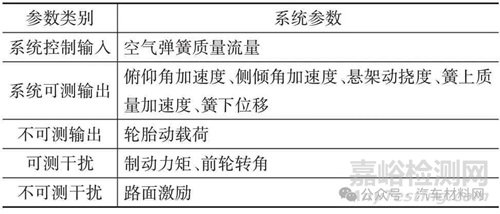
预测模型的功能是根据被控对象的历史信息[u(k-j),y(k-j)],预测其未来输入u(k + j)与未来输出y(k + j)(k为当前时刻,j ≥1),具体输入输出参数如表6所示。
表6 MPC输入输出参数
滚动优化是在每个时间段内的寻求最优,优化的性能指标在内容上也是实时变化的,预测控制的优化过程是反复在线进行的,即滚动优化。优化性能指标为
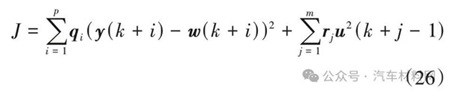
式中qi 和rj 分别为输出加权矩阵和受控输入加权矩阵,可根据期望设定相应权重系数。
在预测模型的基础上考虑被控对象的约束条件并对其进行处理是预测控制的一个主要特征,综合考虑车辆悬架系统的性能要求以及实际行驶情况,需要对滚动优化设定约束条件,即同时限定悬架动挠度不可超出限制(乘用车一般为7~9 cm),轮胎动载荷不能超出车身重力,且车辆滑移率与侧偏角均在合理区间,纵、侧向轮胎力满足式(17)的附着椭圆约束。
被控对象t时刻接收到预测控制器控制信号,被控系统t+1 时刻的实际输出y(t+1)与预测模型预测输出 不相等,构成预测误差:
不相等,构成预测误差:

式中 为预测系统输出;h为误差校正矢量。
为预测系统输出;h为误差校正矢量。
3.2 模型预测(MPC)控制器仿真分析
在Simulink 中搭建ECAS 整车模型及MPC 控制器,假设制动力矩恒定,将俯仰力矩作为状态空间外部输入。仿真工况为:车辆以120 km/h 速度匀速直线行驶,在第7 s 开始减速,减速过程持续6.4 s,车速减到60 km/h,得到两种工况下不同控制器对ECAS 整车模型时域响应的影响,如图10 所示。对比MPC 控制与PID 控制下的ECAS 与被动空气悬架的前悬架动挠度、后悬架动挠度与俯仰角加速度的均方根值和极值,如表7所示。
表7 急减速工况下分数阶模型对车辆响应的影响比较
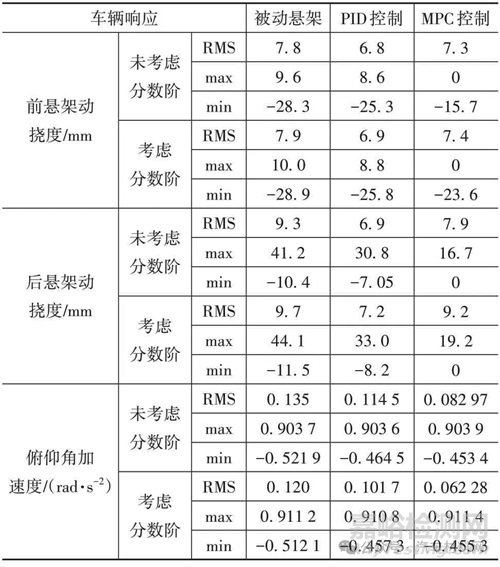
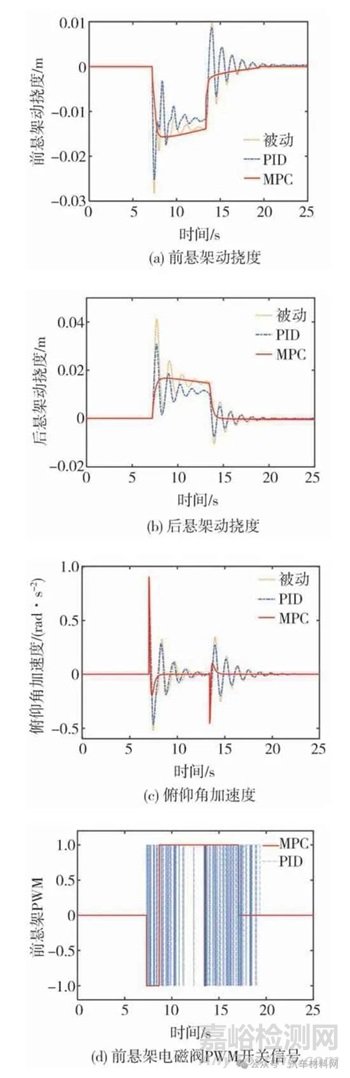
图10 急减速工况下的车辆响应
由图10 和表7 可知,在对ECAS 施加MPC 控制后,前悬架动挠度、后悬架动挠度与俯仰角加速度的极值相比于被动悬架分别下降了18%、54% 和-0.02%,相比于PID 分别降低8%、42%和-0.06%,均方根值相比于被动悬架分别下降了9%、6%和48%,相比于PID分别降低7%、27%和39%,同时,相较于未考虑分数阶修正的ECAS,考虑分数阶修正的被动悬架、PID 控制、MPC 控制的车辆前悬架动挠度均方根值增大1.3%、1.5%、1.4%,俯仰角加速度减小11.2%、11.3%、25.1%。说明MPC 控制器可有效减小悬架动挠度,改善车身姿态,提高舒适性。由于制动力矩为阶跃信号,MPC 控制器针对俯仰角加速度极值的优化并不明显。
为进一步验证MPC 控制器的有效性,进行双移线工况的仿真分析:车速为60 km/h,仿真时长15 s,在第3 s 进行双移线转向,8 s 后换回原车道,得到两种工况下不同控制器对ECAS 时域响应的影响,如图11 所示。MPC 控制、PID 控制与被动空气悬架的前悬架动挠度、后悬架动挠度与俯仰角加速度的均方根值和极值,如表8所示。
表8 双移线工况下分数阶模型对车辆响应的影响比较
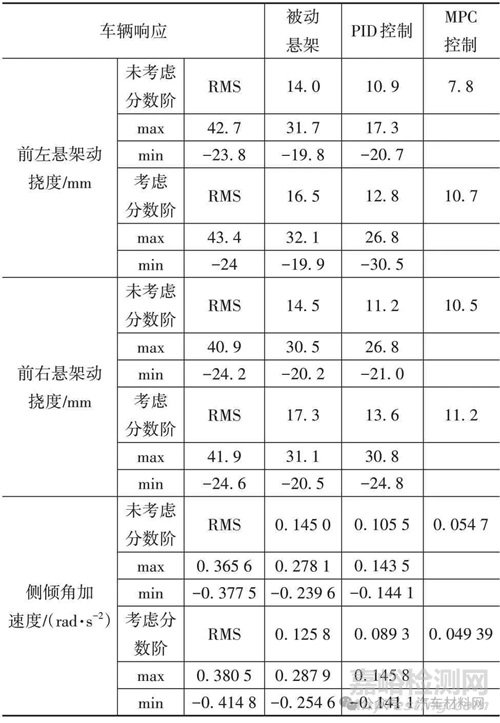
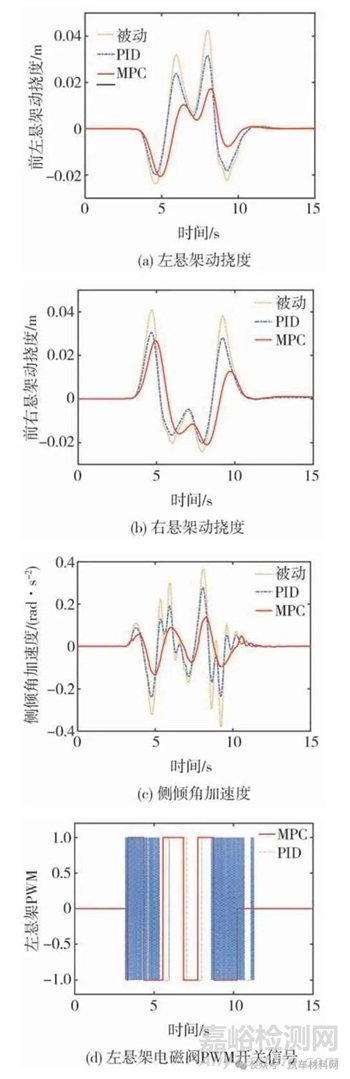
图11 双移线工况下的车辆响应
由图11 和表8 可知,施加MPC 控制的前左悬架动挠度、前右悬架动挠度与侧倾角加速度的极值相比于被动悬架分别下降了38%、27%和66%,相比于PID分别降低17%、1%和45%,均方根值相比于被动悬架分别下降了24%、23%和61%,相比于PID 分别降低2%、0%和45%,相较于未考虑分数阶修正的ECAS,考虑分数阶修正的被动悬架、PID 控制、MPC控制的车辆前左悬架动挠度增大17.9%、17.4%、37.2%,侧倾角加速度减小13.7%、15.4%、9.8%。PID 控制在急减速与双移线中车辆的响应指标除急减速时前、后悬架动挠度均方根略优于MPC 控制外,其余指标均劣于MPC 控制,并且由图10(d)和图11(d)可看出MPC 控制下的电磁阀开关次数明显低于PID 控制。由此可见,对ECAS 施加MPC 控制后,有效降低了车辆在进行急减速与双移线时的悬架动挠度、俯仰角加速度和侧倾角加速度,并且优化效果优于PID 控制,可以使车辆更平稳,保证乘坐舒适性。
3.3 实验验证
3.3.1 实验系统及控制流程
ECAS 实验台由空气弹簧与CDC 减振器组成,主要包括上位机及测控系统、配电控制柜、ECAS 悬架实验台,如图12所示。
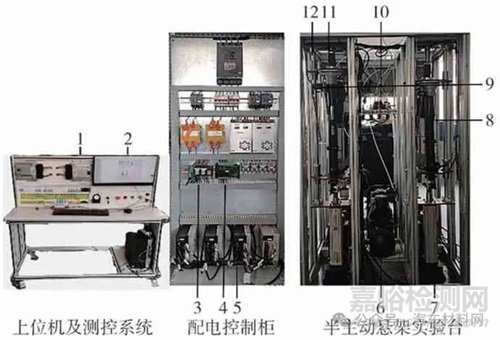
图12 ECAS实验台系统组成
1—MPC5744P 车载控制器;2—装有Labview 的PC 机;3—电流功率放大器;4—PLC 控制器;5—电动缸伺服驱动系统;6—负载压缩机;7—伺服电动缸;8—空气弹簧;9—车身高度传感器;10—电磁阀;11—压力传感器;12—加速度传感器。
本实验台架省去簧下质量部分,从PC 机导出簧下质量位移xw 作为外部激励,由伺服电动缸实现作动,控制流程图如图13 所示,通过加速度传感器采集ECAS 实验台簧上质量加速度信号和车身位移信号,发送至MPC5744P 控制器,进行信号转换以及积分运算,经过滤波后作为控制器输入。ECAS控制器计算出理想质量流量,通过PWM 处理后作为的控制信号。在Labview搭建上位机,可采集实验中被动与施加控制效果时的传感器信号,并对采集的信号进行示波显示及保存。

图13 整车实验台控制流程
3.3.2 实验结果分析
由Simulink 导出被动悬架的动挠度,采样间隔0.07 s,急减速工况及双移线工况的采样时间分别为7和12 s,每次实验时保持空气弹簧高度在同一固定值,且CDC 减振器不通电,以便实现基于空气弹簧的控制效果的验证。采集悬架动挠度,并计算控制前与控制后的极值进行对比分析,以验证控制算法对ECAS的控制效果。
由图14和表9可以看出在急减速及双移线工况下,施加控制后的悬架动挠度有了一定改善,其中,急减速工况中控制后的悬架动挠度极大值下降了1 mm,均方根值下降了2%,双移线工况中控制后的悬架动挠度极小值下降了1 mm,均方根值下降了3.5%。证明本文所提出的MPC 控制在整车ECAS控制中的有效性,可改善车辆在行驶时的平顺性和舒适性。
表9 整车ECAS实验车辆响应
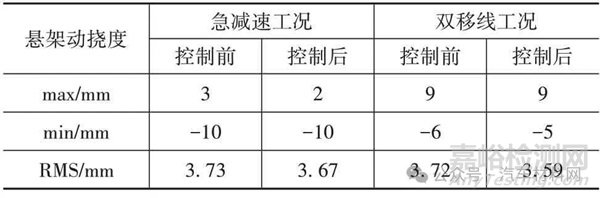
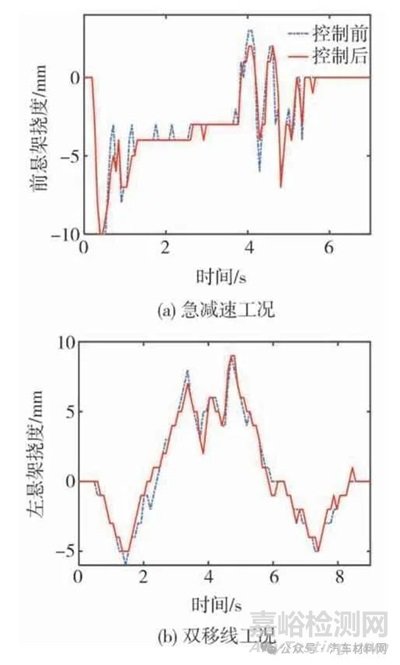
图14 悬架动挠度实验曲线
4、 结论
基于热力学理论和分数阶建立了空气弹簧力学特性模型,通过实验验证了模型的准确性。在此基础上,考虑车辆纵横向动力学特性与Dugoff 轮胎模型,建立了整车ECAS 动力学模型,针对直线与转向行驶工况,设计了整车模型预测(MPC)控制器,并进行了仿真分析和整车ECAS 实验验证,研究结果表明:
(1)建立的分数阶空气弹簧热力学模型,可以很好地表达空气弹簧的力学特性,修正了空气弹簧的黏弹性阻尼特性,实验证明该模型可以较精确描述空气弹簧的力学特性。基于所提出的分数阶空气弹簧模型,通过整车ECAS 纵-横-垂向动力学模型分析,可以很好地反映车辆在行驶过程中的车身姿态变化,进一步表明所建立的空气弹簧模型的可行性。
(2)以降低车身俯仰角加速度与侧倾角加速度为控制目标,设计提出了一种基于整车ECAS 的MPC 控制器,与PID 控制和被动空气悬架控制相比,可有效改善车辆悬架动挠度、俯仰角加速度和侧倾角加速度。其中,急减速工况下,前悬架动挠度、后悬架动挠度与俯仰角加速度的极值相比于被动悬架分别下降了18%、54%和-0.02%,均方根值相比于被动悬架分别下降了9%、6%和48%,双移线工况下,前左悬架动挠度、前右悬架动挠度与侧倾角加速度的极值相比于被动悬架分别下降了38%、27%和66%,均方根值相比于被动悬架分别下降了24%、23%和61%。
(3)整车台架实验表明,采用MPC 控制器控制的ECAS 在车辆响应方面相较于未施加控制的空气悬架有一定优化作用,证明了所设计的控制策略应用于ECAS的有效性。
来源:《汽车工程》作者:冯桂珍1,2,赵东鹏2,李韶华1
(1.石家庄铁道大学,省部共建交通工程结构力学行为与系统安全国家重点实验室,石家庄 050043;2.石家庄铁道大学机械工程学院,石家庄 050043)

来源:Internet