嘉峪检测网 2024-10-31 08:53
导读:近日,南开大学团队开发了一种轻量级的高扭矩移动双侧踝关节外骨骼,具有柔性末端执行器和高效驱动。
导 语
近日,南开大学团队开发了一种轻量级的高扭矩移动双侧踝关节外骨骼,具有柔性末端执行器和高效驱动。轻型外骨骼系统可以提供相当大的扭矩辅助,具有相当好的带宽和跟踪精度,有望促进外骨骼在现实生活和康复中的更多应用。相关研究成果已发表在《IEEE ROBOTICS AND AUTOMATION LETTERS》。
1、研究背景
外骨骼可以增强人体运动性能,各种外骨骼已被开发用于改善人类的活动能力,帮助康复,并研究人机交互。先前的研究表明,许多系绳外骨骼系统可以减少人体在步行和跑步时的代谢消耗。这些系统通常具有强大的外骨骼执行器和轻量级的末端执行器,便于研究定制的外骨骼辅助策略和人类在辅助下的适应性。然而,由于执行器功率密度有限,移动外骨骼的设计需要在系统重量和驱动之间进行折衷功率。为了获得更高的动力而增加驱动重量会扰乱人体的自然运动,从而导致代谢损失和疲劳。在有限的执行器功率和重量下实现辅助效率最大化,有望提高移动外骨骼的容量,缓解开发困难。对于大多数电缆驱动的移动外骨骼系统,执行器只能提供不到50%的步态周期的单向扭矩辅助。在其他步态阶段,执行器几乎是闲置的,提供零扭矩和功率。利用空闲时间,使作动器辅助其它关节或方向,提高作动效率是有希望的。然而,将单个执行器连接到多个末端执行器会导致控制的复杂性,如辅助方向切换和冗余执行器的合作。
2、研究概述
基于功能化导电聚合物的设计,研究团队设计了功能化聚苯胺基时序黏附水凝胶贴片。它可以实现心脏的同步机械生理监测和电耦合治疗,并牢固附着在心脏表面监测心脏的机械运动和电活动。
该研究为了提高驱动效率,将双侧踝关节外骨骼的两个执行器分别连接到两侧的末端执行器上,在不同的步态阶段,它们相互协作,交替地为每条腿提供辅助。在不增加系统重量的情况下,执行器的并联和协作使外骨骼的辅助能力增加了一倍。本研究的贡献是:(a)开发了一种轻量级、可移动的双侧踝关节外骨骼系统,该系统具有结构优化的末端执行器和高效驱动。重量3.4公斤的系统可以为两个脚踝提供80Nm的扭矩辅助,具有出色的功率/重量比。(b)通过并联多个末端执行器,提高了驱动效率。该设计方法有望扩展到其他电缆驱动的外骨骼,以提高辅助能力或减轻系统重量。(c)提出了一种基于迭代学习的反馈补偿控制方法来克服鲍登索的非线性。实验结果表明,该外骨骼具有较好的带宽和扭矩跟踪精度。

图1:移动式双侧踝关节外骨骼(图片来自原文)

图2:外骨骼末端执行器(图片来自原文)
两个关节组件连接节段并限制踝关节在50°跖屈至30°背屈之间旋转。小腿部分通过尼龙搭扣连接到有衬垫的小腿包裹上,脚部分集成在跑鞋中。鲍登电缆连接足跟段和执行器,向足跟带传递向上的力,帮助踝关节跖屈,从而减少小腿肌肉的受力。几项改进使末端执行器更轻量和兼容。柄段包括两个钩形碳纤维支柱和一个x形横梁。钩形的几何形状旨在减少人腿和末端执行器之间可能的接触。柄碳纤维支撑在横向平面上有10◦内旋转(图2(b))。大多数人在走路时通常会有几度的脚趾,所以小腿支撑的内部旋转有助于避免末端执行器之间可能的碰撞。碳纤维的弹性使跟托提供串联弹性,从而减少了界面阻抗。为了减少应力集中,进一步将跟托从之前的折线形状改进为流线型形状(图2(a))。高强度绑带取代了之前的鞋跟绳,卡在鞋跟支架和关节组件之间,提供了兼容的界面和低压力。
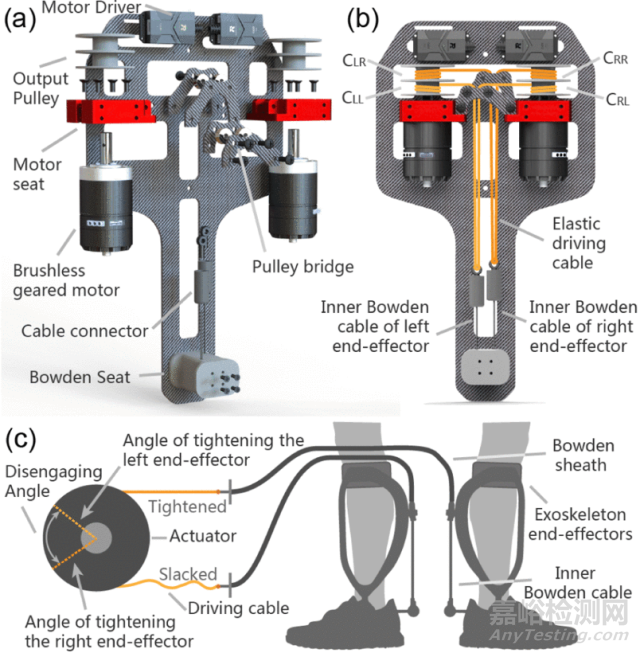
图3:(a)驱动系统 (b)驱动电缆路径 (c)执行器脱离角度示意(图片来自原文)
通过Bowden电缆将两个执行器分别连接到两侧的末端执行器上,使一个执行器可以在不同的步态阶段辅助两侧,两个执行器可以协同驱动,为一侧提供更高的辅助。两个执行器安装在铝制座椅上,并平行固定在碳纤维底座上(图3(a))。每个执行器都有一个双层输出滑轮,每一层都用滑轮桥重定向的驱动电缆捆扎,并连接到一条内部鲍登电缆(图3(b))。为避免驱动电缆之间的耦合和干扰,在每根电缆的拧紧角位置之间设计了一个脱离角(图3(c))。
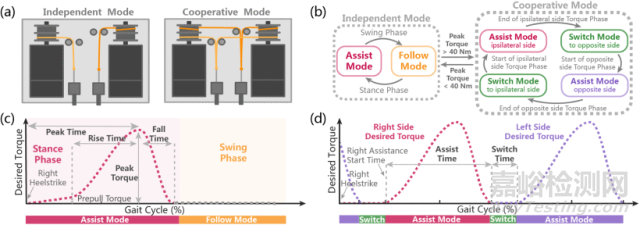
图4:(a)不同驱动配置的原理图 (b)设计的运行状态机状态转换图 (c)独立模式下参数化的扭矩分布图 (d)合作模式下两个踝关节的期望扭矩分布图(图片来自原文)
由于驱动电缆的冗余性,驱动系统可以在独立模式和协同模式之间运行(图4(a))。当辅助小于40Nm时,单个执行器可以输出足够的扭矩,使两个执行器分别为每个末端执行器提供辅助。设计了一个状态机来自动设置和转换执行机构的工作模式(图4(b))。其中t为该步幅的步态时间百分比,Tr、Tf、Tp和Γp分别代表上升时间、下降时间、峰值时间和峰值扭矩(见图4(c))。
结果主要分为以下三个方面:
1)最大扭矩:所需的转矩以步进信号的形式产生,在0.2 s上升,并保持0.8 s。独立配置和协同配置的扭矩值分别为40Nm和80Nm,几乎达到了目前发动机的极限。只有PD*控制器用于跟踪所需转矩。每次试验进行30次,取结果平均值[图5(a)]。独立配置和合作配置的上升时间分别为78和110 ms。进行方向切换试验,测试电机在独立模式和合作模式下辅助方向切换时的切换时间。被测电机的期望角位置以300◦幅度的阶跃信号产生,以0.2 s上升并保持0.8 s,并由位置控制器跟踪。该试验也进行了30次[见图5(b)]。平均切换时间为0.15 s,约占步态周期的13.5%,持续时间为1.1 s。

图5:(a)最大扭矩 (b)位置阶跃响应试验 (c)转矩频率响应结果(图片来自原文)
2)闭环扭矩带宽:与最大转矩阶跃响应测试相同,通过PD*控制无补偿迭代学习跟踪期望转矩。波德图(图5(c))由快速傅里叶变换(FFT)生成。每种情况执行5次,结果取平均值。带宽计算为增益下降至-3 dB。独立模式和合作模式的增益限制闭环带宽分别为10.0 Hz和10.9 Hz。
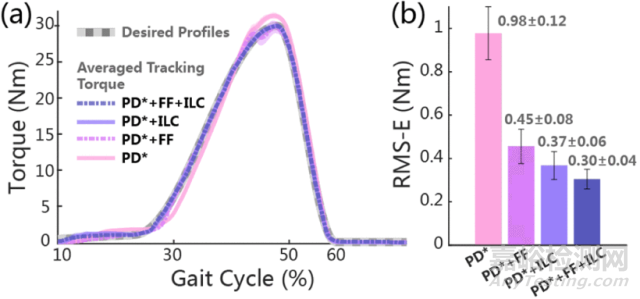
图6:(a)不同控制器组合下转矩跟踪结果 (b)各控制器的航迹RMS-E(图片来自原文)
3)扭矩控制器评估:对PD*、PD*+FF、PD*+ILC和PD*+FF+ILC控制器进行了独立配置测试。一位经验丰富的用户(男性,1.72米,70公斤)在跑步机上以1.25 ms−1的速度行走外骨骼。将所需扭矩曲线的上升时间、下降时间、峰值时间和峰值扭矩分别设置为25%、10%、48%和30Nm。在数据收集前的行走过程中对控制参数进行了很好的调整。对于每个被测控制器,在2分钟的自适应行走和1分钟的迭代学习后,收集1分钟的稳态数据。取两侧踝关节测量扭矩的平均值,计算均方根误差(RMS-E)(图6(b))。通过模型补偿,PD*+FF控制器的响应速度比简单PD*控制器快,RMS-E显著降低(0.98 ~ 0.45 Nm)。PD*+ILC和PD*+FF+ILC控制器可以消除大多数误差,冲击和变化较小。集成PD*+FF+ILC控制器实现了最低的RMS-E (0.30Nm,峰值扭矩的1%)。
3、研究意义
本研究利用执行机构的并联和协同辅助来实现这一目标。每个执行器可以在不同的步态阶段辅助两个末端执行器,并且两个执行器可以协同辅助以提供双辅助扭矩。独立驱动模式具有良好的可控性,而合作驱动模式可提供高达80Nm的辅助扭矩。在力矩跟踪对比实验中测试的单作动器模式可以在一个作动器故障时发挥作用,增强了整个外骨骼系统的鲁棒性。
参考文献:
Chen J, Ding J, Han J, et al. Design and Evaluation of a Bilateral Mobile Ankle Exoskeleton With High-Efficiency Actuation[J]. IEEE Robotics and Automation Letters, 2024. DOI:10.1109/LRA.2024.3391695.
来源:Internet
关键词: 关节外骨骼