嘉峪检测网 2024-11-01 08:40
导读:本文介绍了血管介入手术机器人其力反馈技术研究。
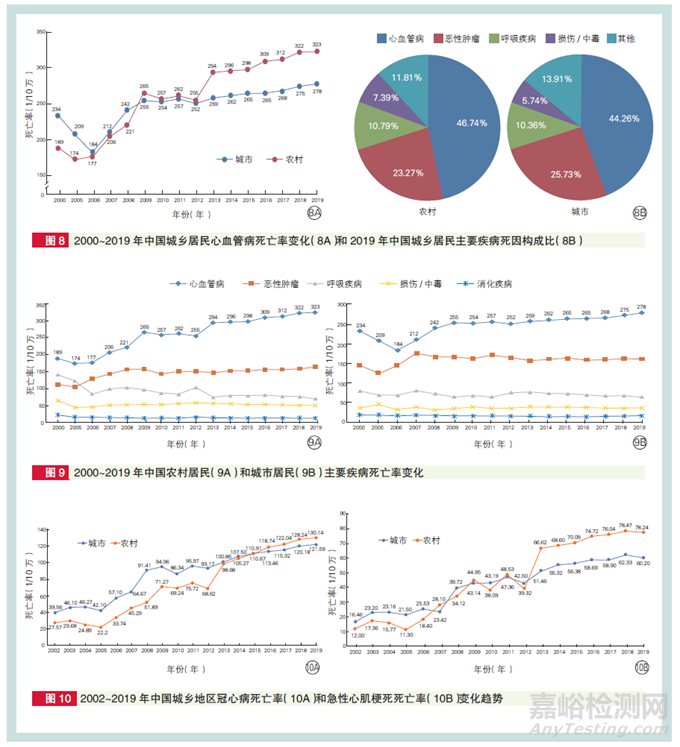
根据2022年6月发布的《中国心血管健康与疾病报告2021》, 心血管疾病已成为医学界公认超越癌症的人类健康头号杀手, 且发病率呈上升趋势 。 微创血管介入手术因为创伤小、恢复快、并发症少等优点, 已经成为治疗心血管疾病的主要治疗手段。血管介入手术机器人技术的出现, 提供了手术部分过程自动化的可能性, 也为医疗带来了革命性的变化。
当前, 新产品和新技术不断涌 现, 例如,Stereotaxis公司在首个磁导航Niobe系统的基础上, 设计出的GenesisRMN系统, 它缩小了永磁体的体积,改进了磁体的操控方式, 提高了响应速率。 Corindus公司的CorPath GRX则在CorPath 200的基础上 , 增强了主动变形导管的功能, 并进行了人体试验。
与腔镜、 骨科等手术不同 , 血管介入手术高度依赖于装置的反馈信息。因此, 如何让机器人更好地充当我们的“ 眼” 和“ 手” 就显得非常关键。血管介入手术机器人的视觉反馈主要依靠图像导航技术。
磁共振、光学相干断层扫描、血管内超声显像、荧光成像等影像学技术可以用来发展兼容导管技术,从而提升血管介入机器人导航图像系统的性能, 使机器人在手术中能看得更清楚、更远,操作更精准。力反馈的缺失限制了机器人在复杂困难病变、钙化病变、慢性闭塞病变中的应用, 然而目前还没有非常成熟的具有力反馈功能的血管介入手术机器人。这一亟待解决的难题需要通过相关零部件和配套技术的不断优化和创新来实现技术突破,仍然有很长的路要走。
1-设计力反馈单元面临的基本问题
在传统手术过程中,医生需要根据自身经验和视觉反馈信息,判断导管与血管内膜的接触力 是否会造成损伤。但是,医生的经验、疲劳程度、手部震颤等因素也会影响导管的操作。
使用介入手术机器人, 尤其是具有力反馈功能的机器人, 可以有效避免这些不利因素, 实现手术的半自动化和稳定性。为了更好地设计出精准的力反馈单元,需要考虑几个基本问题:
1-人手的感知力问题
要实现力反馈单元, 首先要了解人手能够准确地感受到力的过程。当手部皮肤受到外部机械刺激时, 皮肤中的感受器群体会产生放电响应 ,这些信号通过神 经传送给大脑进行综合分析, 形成力感知。目前血管介入手术机器人的力感知主要是压力感知(即力的可分解量化)。
研究表明,人手感知力的最小阈值为0.05N,差别阈值在0.5~1.5 N之间 。因 此,力反馈单元设计的最小阈值要<0.05N。同时,力反馈单元设计的最大阈值要考虑医生的疲劳感,保证医生手术操作的舒适度。此外,为了更加精准地获得人手与力反馈的感知情况,可以尝试建立相应的力感知模型,获得人体感知与客观刺激之间的定量描述,以此促进力反馈技术的发展。
2-力损耗和力补偿问题
从导管或导丝接受力,到人手感知力,这个过程中会有一些力的损耗,导致反馈到人手的力精度不足,影响力反馈的透明性。这些力的损耗可能源于血管介入手术机器人中的连杆重力、机械惯性等因素引起的摩擦力 。
因此需要设置相应的机械力补偿单元或引入力补偿控制算法,来平衡损耗力的力矩。根据补偿力的性质, 可以分为配重补偿、弹簧补偿和辅助执行器拖动装置补偿。
2-血管介入手术机器人力反馈的实现方式
由于现有的商业操作手柄存在运动行程有限、不符合医生操作习惯、不能实现360° 连续旋 转(例如Touch X)、成本高昂等问题,如何研究出更适合介入手术机器人临床使用的力 反馈系统成为当前的研究热点。
根据反馈力单元的原理不同,血管介入手术机器人的力反馈可以分为:基于机械作用的力 反馈、基于电流变液的力反馈、基于磁流变液的力反馈等方式。

1-机械力反馈
基于机械原理的血管介入手术机器人力反馈方式是较早发展的一种方式。Payne等研发了 一款介入手术机器人,该机器人利用主端的音圈 电机实现径向力反馈功能, 当导管末端的应变片检测到碰撞力时,计算机将力的数值传递给音圈电机, 音圈电机产生力再传递给人手。
该系统的优点是符合人体工学设计,模拟医生真实操纵导管,减少了学习时间;缺点是没有实现轴向力反馈功能,且设计的行程太短,需要频繁往复调整。
Yang 等 [24] 研发了 一种主从介入手术机器人的 同 构交互式主控制 器, 与其他研究不同 的是, 它采用了 两种不同 的力 反馈方式, 一种是通过改变电 流发送一个径向 力反馈信号, 电机产生相应的转矩,实现径向 力 反馈;另 一种是通过调节励磁电 流利用磁粉制 动器产生扭矩, 实现轴向 力 反馈。机械力 反馈主要是通过计算机控制 输入电 压改变电 机的转动扭矩实现, 但由 于启 停过程中 电 机都需要克服一定的惯性, 无法做到 同 步反馈, 严重影响了 医生的判断。而且加装了 电 机之后的整个机械系统都变得更复杂且体积庞大, 压缩了 手术空间,还会产生噪声影响[25] 。因 此,基于机械力 作用 的血管介入手术机器人力反馈系统仍存在明显弊端。
2-电流变液力反馈
因为机械力反馈反方无法解决的电机惯性问题, 新兴智能材料进入到人们的视野当中。电流变液 (ERF)是一种可以通过改变外加电场改变其形态的特殊液体,一般由绝缘基础液、固体介电粒子及添加剂组成。
电流变效应指的是柔性材料 (如悬浮液或胶体)在外加电场下其流变性能 (如黏度、剪切应力、剪切模量等) 发生显著变化的现象。ERF可控的屈服应力、弹性模量是其成为智能材料的主要原因。
然而基于ERF的力反馈方式因为所需电流过大,缺乏一定的安全性,无法投入到实际运用当 中。这也是电流变液力反馈技术的致命缺点, 这种智能材料的工作电压在0~5kV左右, 远远超过了人体的安全电压,实际应用过程中 存在极大的安全隐患,工作条件受到极大限制。
3-磁流变液力反馈
磁流变液(MRF) 结构上与ERF类似,不同的是利用磁导原理, 由软磁性颗粒、非导磁性载液和添加剂组成。羰基铁粉是软磁性颗粒的一般材料。弥补了ERF不足的MRF,线圈中 的电流通常在1~10A的范围内,而且MRF相对于ERF具有更高的灵敏度,可根据磁场强度几毫秒内瞬时改变形态。因此,采用MRF产生阻尼应用于力反馈技术具有更为广阔的发展前景。
但在MRF的使用过程中也发现了问 题:
⑴ 其流体状态在清洁区域(如手术室)的可用性存疑,并出现大量产热的现象(由于线圈的功耗),导致不准确的力呈现;
⑵基于MRF的系统因为其被动黏度(即在没有外部磁场的固有黏度),不能在导管上产生零摩擦度。
在此基础上,Hooshiar等开创性地提出利用磁流变弹性体(MRE) 作为扭矩调节介质, 使用永磁体代替线圈产生前所未有的径向磁场。该装置能够产生和控制高达115∶50∶7 mNm的阻力扭矩和高达5.77N的触觉力,在机器人辅助心血管干预的触觉反馈应用方面显示出良好的性能。
4-其他力反馈
除上述的直接力反馈方式外, 力反馈也可以通过其他方式实现, 比如 “局部力反馈” 和“感知替代”。
Sankaran等提出了一种血管内机器人系统, 该机器人使用力校准来找到一个动态阈值,从而引起触觉振动,从而在机器人对血管施加过多的力时提示外科医生。Dagnino等则提出了一种新的血管内置管机器人平台CathBot,它是一个符合人体工程学的主从系统, 配备有导航系统和基于视觉的集成力反馈, 旨在保持血管外科医生的自然床边技能, 并经试验证明,当其提供力反馈时,平均力下降70%, 最大力下降61%。
3-血管介入手术机器人力系统的需求分析
无论是机械力反馈、电流变液力反馈、磁流变液力反馈或者其他力反馈技术, 对于血管介入手术机器人系统而言, 都需要经过以下几个步骤:
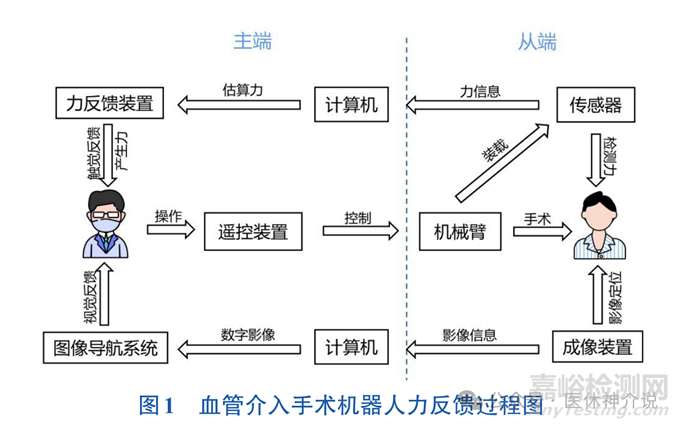
力传感器检测导管/导丝与血管壁的接触力,计算机根据力信号估算反馈力,力反馈装置将反馈力传递给医生的主手, 医生根据视觉和力 觉反馈调整操作策略 (下图) 。根据血管介入手术机器人的特点,血管介入手术机器人系 统应该具备以下几个方面的能力。
1-合理的力传感器设计
一般而言,应变片是组成力传感器的主要元件,具有防水性能好、体积小等优点。它们通常贴在一块弹性体上并通过检测 弹性体的形变程度实现多自由度检测力。因此,弹性体的设计需要考虑与机械结构的刚度相匹配。为了减少电阻式传感器的迟滞性影响 , 一般采用应变片 和弹性体一体化的力 传感器。另外,可替代应变片的新型导电聚合物材料也在小范围内 得到了应用,例如,基于炭纳米管(CNT)传感器、基于柔性导电聚合物复合材料(FCPC)传感器。
近年来,由于电阻式传感器在血管介入手术应用环境中 存在尺寸限制, 光纤力传感器得到 了关注,并且相关技术也在积极开展研究,例如Tang等基于自由和约束拓扑(FACT) 方法开发了一种用于手术机器人触觉反馈的新型高精度光纤布拉格光栅(FBG)支持的三轴远端力传感器。
2-精准的受力检测
目前,手术机器人领域的力检测方案主要有两种:直接检测和间接检测 。
直接检测包括基于电阻和光纤两种方式;间接检测包括基于位移以及基于执行器输入量两种方法。对于血管介入手术机器人而言, 直接检测方式因为机械关节的间隙与摩擦对检测 精度的影响,力传感器放置于导管顶端位置为最优。
但是血管内环境的特殊性也给传感器尺寸提出了高要求。间接检测简而言之就是检测与直接接触力有联动影响作用的元器件信息, 通过测量导管的近端力来估计导管与血管壁的接触力。具体来说,其中位移检测即为检测接触到力的弹性元器件(如弹簧)的位移变化,执行器输入量主要是指根据电动机的电枢电流或气缸气压的变化建立相应数学模型估算力觉信息。
3-瞬时反馈能力
相对于其他外科手术,血管介入手术因其操作环境的狭窄性对手术的每个步骤都要求极高,过程中微小的差距都可能引发截然不同的手术结果。考虑到人体生理反应速度和人机交互系统反应时间,力反馈装置应该具备优秀的瞬时反馈能力,反应时间应短尽短,减少整个力反馈系统的迟滞现象。
来源:Internet
关键词: 手术机器人