嘉峪检测网 2024-12-26 08:46
导读:近期,上海交通大学生物医学工程学院同国家康复辅具研究中心合作研发了一种新型仿生手假肢虚拟训练平台,同时通过视觉和触觉反馈实现闭环力控制。
导 语
近期,上海交通大学生物医学工程学院同国家康复辅具研究中心合作研发了一种新型仿生手假肢虚拟训练平台,同时通过视觉和触觉反馈实现闭环力控制。相关成果发表在IEEE Transactions on Neural Systems and Rehabilitation Engineering上。
1、研究背景
仿生假肢旨在为截肢者恢复运动功能并提升生活质量。们目前大多数商业化假肢通过表面肌电(sEMG)信号来驱动,但缺乏有效的触觉反馈。而触觉反馈对于提高力量控制的准确性尤为重要,特别是在视觉反馈受阻或需要精准控制时。本文引入了一种基于电感应触觉反馈的仿生控制方法,以期为截肢者提供更自然的触觉反馈。
2、研究概述
基于功能化导电聚合物的设计,研究团队设计了功能化聚苯胺基时序黏附水凝胶贴片。它可以实现心脏的同步机械生理监测和电耦合治疗,并牢固附着在心脏表面监测心脏的机械运动和电活动。
本研究开发了一种基于肌腱驱动的仿生手虚拟模型,在MuJoCo环境中通过仿生控制器模拟对假肢的力量控制。六位前臂截肢者参与了力量跟踪和保持任务,实验条件包括有无视觉和触觉反馈的多种组合。

图1:集成虚拟假肢手训练系统概述(图片来自原文)
实验包括两项力量控制任务:(1)力量跟踪任务:受试者需要根据实时视觉反馈调整抓握力量,以跟踪不断变化的目标力量。(2)力量保持任务:受试者需要在目标力量范围内保持稳定的抓握力,并防止超出滑脱或破坏力的范围。受试者通过sEMG信号控制虚拟手,并通过电感应触觉反馈系统获得抓握力信息,从而进行实时调整。

图2:(A)力跟踪任务(B)力保持任务的任务场景(图片来自原文)
实验结果表明,视觉反馈在力量控制任务中起主要作用,当视觉反馈缺失时,触觉反馈显著增强了抓握力量的控制稳定性。触觉和视觉反馈的效果具有个体差异性,当同时接受两种反馈信息时,不同受试者的表现有所不同。

图3:力跟踪任务中的运动表现(图片来自原文)

图4:力保持任务中的运动表现(图片来自原文)
通过比较不同反馈条件下的力量跟踪误差(RMSE)、成功率和力量相关性,研究发现视觉反馈是抓握力量控制中的重要因素,特别是在缺乏视觉反馈的情况下,触觉反馈能够有效提高运动表现。这验证了仿生手虚拟平台作为训练截肢者的有效性,同时表明触觉反馈可以在缺乏视觉信息时作为可靠的替代反馈源。
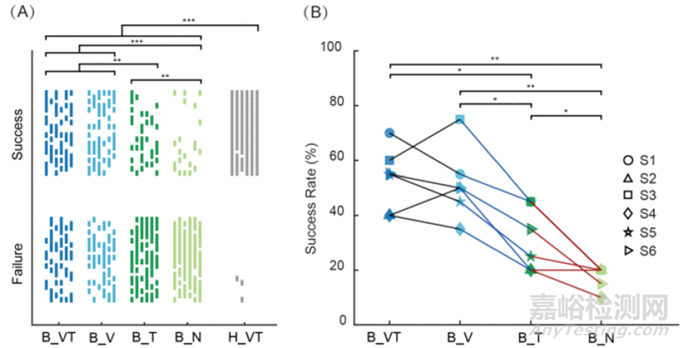
图5:运动表现和力量保持任务的成功率(图片来自原文)
根据图5的结果显示,当使用具有视觉和触觉反馈的健康手控时,除了偶尔出现的小错误外,所有受试者都能够以几乎100%的成功率执行任务
3、研究意义
本研究首次将基于电感应的体感触觉反馈与仿生控制相结合,为截肢者提供了一个集成的假肢训练平台,旨在帮助他们最大化假肢的运动表现。未来,该平台可以用于训练截肢者建立仿生控制与触觉反馈的内部模型,以提高运动控制的准确性。
该研究在国家重点研发计划和上海市科学技术委员会项目支持下完成。上海交通大学生物医学工程神经康复工程实验室、国家康复辅具研究中心,上海交通大学医疗机器人研究院为本文完成单位。
参考文献:
Zhang, Z., Xie, A., Chou, C. H., Liang, W., Zhang, J., Bi, S., & Lan, N. (2024). Closed-Loop Force Control by Biorealistic Hand Prosthesis with Visual and Tactile Sensory Feedback. IEEE Transactions on Neural Systems and Rehabilitation Engineering. DOI: 10.1109/TNSRE.2024.3439722
来源:Internet
关键词: 仿生手假肢虚拟训练平台