水凝胶致动器因其独特的柔软性、响应性和生物相容性而被认为是肌肉替代和生物医学应用的有前途的候选者。然而,它们的响应速度和致动强度等性能很难与人体骨骼肌或弹性体致动器相提并论,这种差异源于它们的致动机制。现有的水凝胶促动器大多由溶剂扩散诱导的体积变化驱动,因此具有两个特点:1)响应速度与溶剂扩散速度相关,并且与材料半径的平方成正比,这限制了大尺寸材料的制造;2)驱动强度取决于脱胀所做的功,因此具有受溶胀比限制的最大值。因此,大材料尺寸、高响应速度和高驱动强度的组合很难在单个水凝胶中实现。相比之下,人体骨骼肌在整体性能上明显超过水凝胶致动器。肌肉由高效的区室模式驱动,肌层滑动发生在微响应单元中以产生力和变形。这种机制依赖于名为筋膜的亲油组织来协调所有响应单元,原因是筋膜可以定向其变形并收敛其输出力。
受骨骼肌的启发,来自北京航空航天大学的学者在这里报告了一种有机水凝胶致动器(OHA),它协同地结合了定向亲水响应网络和亲油通信网络。在OHA中,溶剂可以混淆在疏水微域内,而驱动可以通过响应网络的定向变形来完成。基于该机制,OHA表现出0.11 Hz的尺寸独立响应速度和47.3 kPa的驱动强度,超过了传统的水凝胶(<10−3 Hz和10−1kPa)。采用共聚焦激光扫描显微镜(CLSM)、小角X射线散射(SAXS)和差示扫描量热仪(DSC)对OHA的体积相变过程进行了显微镜分析。这些表征揭示了亲油网络以及响应网络如何混淆溶剂并实现各向异性驱动。本研究认为肌肉模拟策略可以拓宽水凝胶致动器的现有驱动机制,同时显着突破其上限效率。相关文章以“High-Performance Organohydrogel Artificial Muscle with Compartmentalized Anisotropic Actuation Under Microdomain Confinement”标题发表在Advanced Materials。
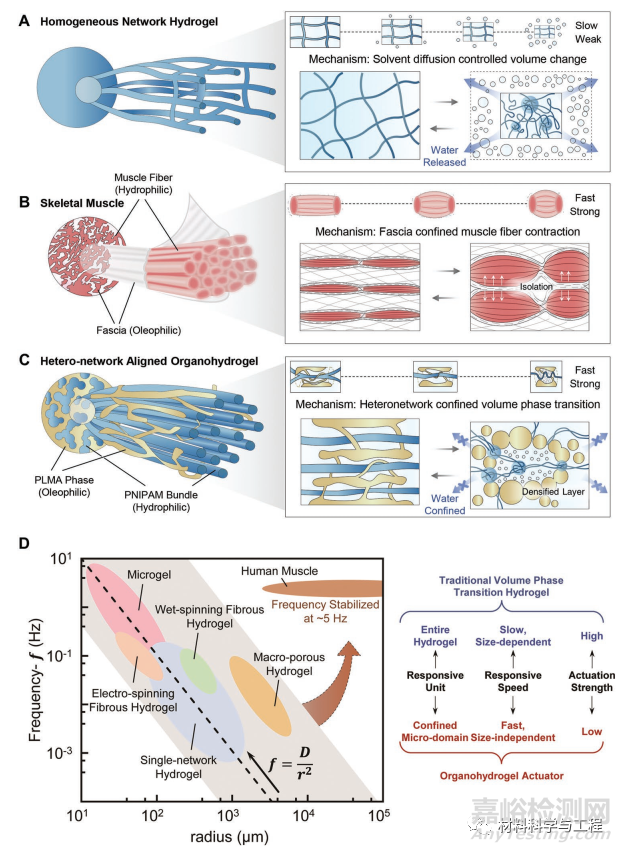
图1.有机水凝胶促动器的设计概念、机理、制造和结构。A)溶剂扩散驱动的传统均相网络水凝胶示意图。B)人体骨骼肌结构和肌层滑动机制,其中筋膜隔离相邻肌腈并混淆其驱动方向。C)异质网络取向有机水凝胶的结构。D)传统水凝胶遵循以下规则:响应时间与材料半径的平方成正比
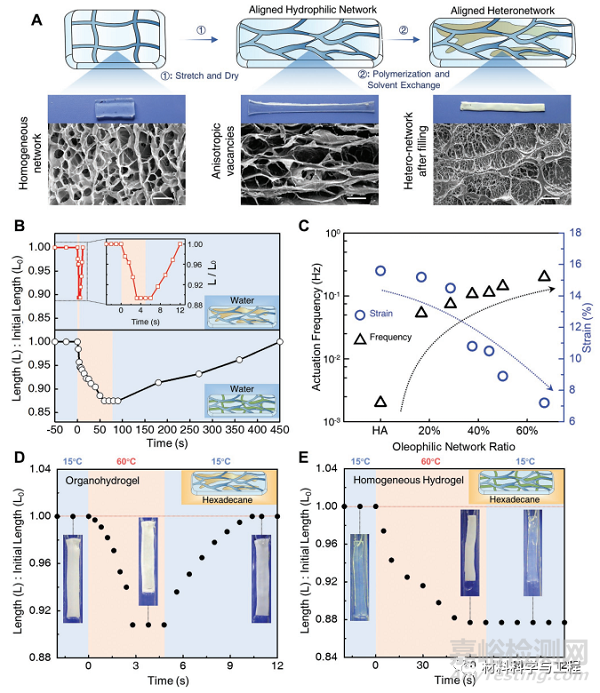
图2.OHA的驱动速度和应变。A)每个步骤对应的制造工艺和SEM图像。冷冻干燥后对样品的每个步骤的SEM图像进行表征,比例尺为25μm。B)在水环境中驱动的OHA和HA的比较。C) 在 16.7%、28.6%、37.5%、44.4%、50% 和 66% 的亲油网络比下测试的 OHA 的驱动频率和应变 D) OHA 和 E) HA 在 15 至 60 ℃ 的正十六烷中驱动。
图3.OHA的驱动强度。A) OHA的拉伸应力-应变实验,在10 mm min−1,25°C的速度下进行测试。b) 等距模型测试装置示意图。C)拉伸比范围为1至6的有机水凝胶,纯PNIPAM凝胶和双网络VPT凝胶的驱动强度,通过热水快速加热至60°C。D)拉伸比和E)网络比的驱动强度曲线。F) 驱动强度随拉伸比和亲油-亲水网络比而变化。G) OHA 的周期输出,由电压为 0 至 60 V 的电加热管驱动。H) 有机水凝胶、湿法纺丝纤维、静电纺丝纤维、光响应凝胶和 VPT 凝胶的驱动强度和驱动频率比较。
图4.软混淆环境下OHA相变过程机理分析.A) CLSM 图像和网络结构图在 15 到 60℃之间,比例尺为 50 μm。B) OHA 和 PNIPAM 的 DSC 测量,以 5℃ min−1的速率从 15 ℃ 加热到50 ℃。C) 25 ℃下 OHA 的 ATR-FTIR 光谱。D)恢复含有弹性或粘度亲油网络的有机水凝胶的驱动强度。E)OHA与当前水凝胶促动器的性能比较。F) 水蒸气驱动过程、加热和冷却演示
本研究通过结合异构网络制造了高速、高驱动强度、大型凝胶致动器。亲油网络的软混淆效应可以概括为三个部分:i)通过形成疏水致密层在微域中混淆溶剂,将水运动从远程转变为短程。ii)PNIPAM网络变形的方向,定向集中驱动力。iii)储存弹性能以协助伸长过程。本研究相信OHA的网络变形机理可以为驱动性能的改进提供更多空间,拓宽水凝胶促动剂的应用范围。
论文链接:https://doi.org/10.1002/adma.202202193
来源:材料科学与工程
关键词:
水凝胶
人造肌肉