嘉峪检测网 2024-11-14 08:26
导读:本综述主要通过四个方面介绍微型机器人。
摘 要
长期以来,世界各地的科学家一直致力于制造可在人体内控制的微型机器人,用来帮助医生识别和治疗疾病。这种微型机器人能够通过自然腔道进入人体难以到达的部位,实现微创治疗。本综述主要通过以下四个方面进行介绍:首先,提供有关目标工作环境的有价值的解剖学和生理学信息,以及设计医疗微型机器人的工程工具;其次,提供相关类别医疗微型机器人技术现状的全面调查;第三,分析目前可用的与体内环境兼容的跟踪和闭环控制策略;第四,探讨仍然存在的挑战,用来帮助未来的研究。
一、介绍
通过无线控制进行疾病诊断和治疗的微型机器人正在成为现实。这些微型工具(本文称之为微型机器人)的整体尺寸从毫米到微米不等,能够利用人体的自然腔道进入传统介入器械无法进入的部位进行诊断治疗。
虽然微型机器人在实验室环境中被证明前景广阔,但要将其用于临床实践仍有许多难题需要解决。想要将宏观机器缩小到微观尺度的想法暂时是困难的,因此科学家必须从了解微尺度的运动、交互和制造物理学出发,利用独特的驱动和控制策略(如基于无线驱动的策略),开发一种自下而上的微型机器人方法,如下图所示。
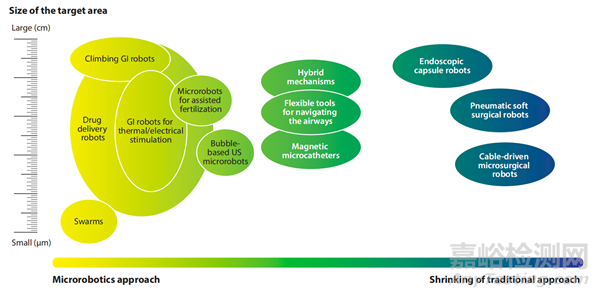
图. 医疗微型机器人的类别(微型机器人可根据其尺寸和设计方法进行分类)
二、可进入人体的微型机器人
1、关键应用领域的解剖学和生理学
不同的应用场景(部位)决定了微型机器人的不同特征,如尺寸、机械性能、力输出和制造材料等。人体的自然腔道是微型机器人通路的可选择路径之一,例如由动脉和静脉组成的循环系统、胃肠(gastrointestinal,GI)系统、呼吸道、泌尿道、神经系统的蛛网膜下腔、眼睛和生殖通道等都是能够到达身体不同区域的可能路径,如下图/表所示。
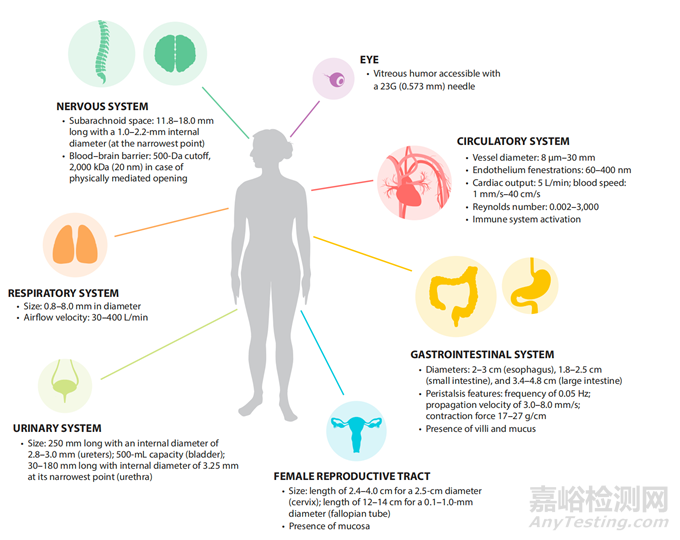
图. 微型机器人可应用的场景

表. 与微型机器人相关的人体区域的主要解剖特征
2、生物屏障
人体外部的主要生物屏障是皮肤,在手术中可能需要切开皮肤才能将微型机器人放入体内;此外在内部还存在其他屏障,如消化道和泌尿生殖道的粘液层、血脑屏障(blood–brain barrier ,BBB)等。因此微型机器人想要发挥作用,不仅需要躲避人体免疫系统的攻击,还需要具备跨过这些生物屏障的能力。
三、驱动机制
为微型机器人选择合适的驱动机构时,必须考虑到工作环境的特点,如环境应力、尺寸限制、生物障碍等,以及微型机器人本身的特性。如下图所示,在本综述中,作者重点对基于磁场、超声波和光的驱动机制进行介绍。
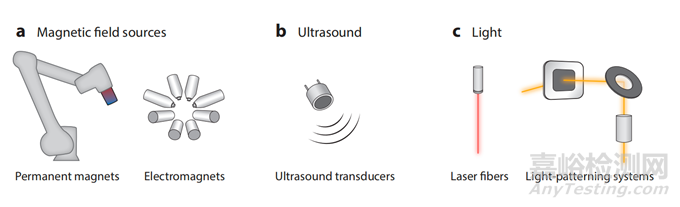
图. 微型机器人的驱动机制 (a)磁场,(b)超声波,(c)光
四、体内微型机器人的跟踪
微型机器人要到达体内的特定目标区域执行任务需要进行精细控制,这反过来也需要对其位置和激活状态进行及时跟踪。光学跟踪是体外医疗设备观察的黄金标准,其通过安装在仪器上的摄像头的检测设备进行监测,但是在没有光线的情况下该检测方式会失效;基于传感器的方法,如电磁,可用于体内无光线情况下的监测,但是其对空间的要求也使得该方法有所限制。目前已经提出了基于超声波、磁场、光、电离辐射或这些方法组合的医学成像方法用于跟踪和监测组织中的微型机器人,其中基于超声波和磁场的方法应用最为广泛,如下图所示。
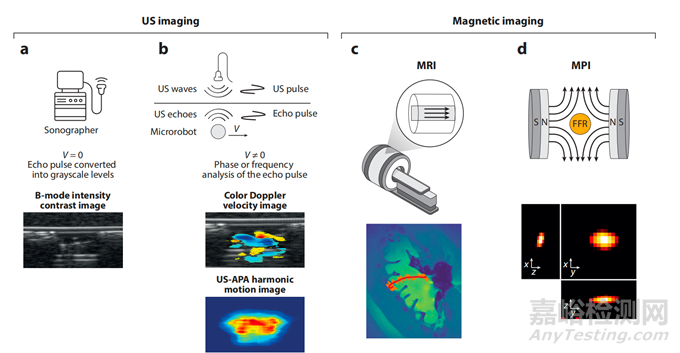
图. 微型机器人中的超声波和磁成像
五、用于生物医学的微型机器人
微型机器人已经被广泛用于执行从微创手术到靶向药物给药和健康监测的医疗任务。正如前几节所概述的,人们已经研究了微型机器人在临床实践中通过无线控制进行能量传递、驱动和跟踪的策略。鉴于它们的非侵入性和灵活性,微型机器人有望克服传统介入工具和技术瓶颈所面临的困难。靶向药物输送因其所需的精度较低而被大量研究。下文主要回顾使用微型机器人在循环系统、胃肠道中执行医疗任务时取得的成果。
1、用于血管循环系统中的微型机器人,如下图所示
图a:在物理方法中,生物仿真胶体粒子可以在声场或磁场作用下单独或组合向目标方向移动,如利用声磁激活的自组装微型机器人实现了沿血管上游运动;
图b:在血管中,利用抗体介导的靶向能力,将药物选择性地输送到特定的肿瘤部位;
图c:在小鼠脑血管中激活自组装微型机器人;
图d:在神经血管模型进行的体外测试和猪肱动脉的体内评估中,通过构建的系统进行导航,该系统将磁性微导管与机械臂相连实现精确操纵,并结合 X 射线实现实时三维导航;
图e:利用磁传感器进行反馈驱动控制,进行药物输送、跟踪和导航功能;
图f:在活体猪模型中展示微导管在血管中导航的能力。
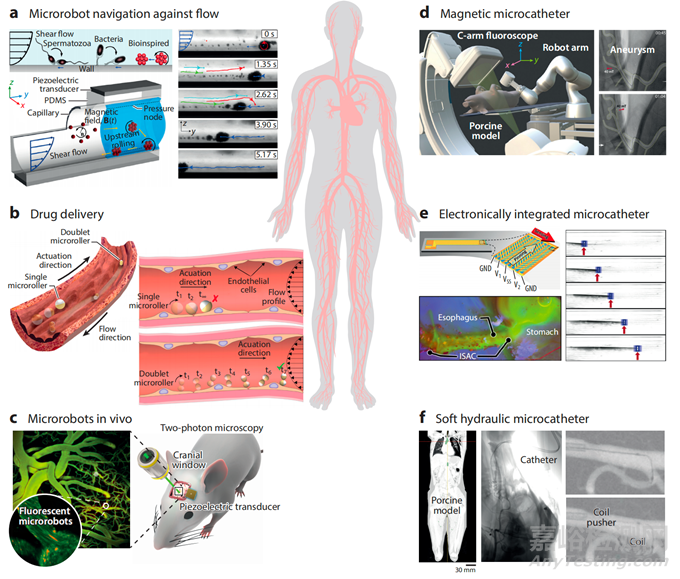
图. 用于血管系统的微型机器人和微型导管
2、用于胃肠道的微型机器人,如下图所示
肠道系统的复杂性在于其路径复杂、绒毛和粘液的存在以及与体表的距离,因此想要在该区域的特定部分进行运动并到达目标位置是相当困难的,为了解决这些问题,科学家提出了不同的方法进行应对。
图a:设计一种多孔、掺杂二氧化硅的柔性磁驱动机器人,用于改善蠕动干扰的非理想环境中的运动;
图b: 设计一种毫米级的自定向机器人,它能够通过磁力到达目标位置,并在胃粘膜上部署药物微针以输送大分子药物(用于小鼠胃出血的治疗);
图c:设计一种能够在磁场下实现可控运动的四足机器人,它能够在复杂的环境中高效地完成拾放任务;
图d:通过使用外部磁场控制机器人与组织之间的相互作用,并通过X 射线进行可视化诊断;
图e:设计一种无电池、可变形的电子食管支架,用于对食管下括约肌进行无创无线刺激;
图f:将微尺度磁性机器人组织成纤毛状结构,使其具有更强大的通过障碍物和实现灵活部署的能力。

图. 消化系统中的微型机器人
来源:Internet
关键词: 微型医用机器人