传统外骨骼或拐杖式辅具往往在“刚性支撑”与“柔性顺应”之间顾此失彼,更难以快速同步感知人体意图、补偿浮基扰动并预判跌倒风险,导致患者“想用却不敢用”的困境长期存在。为此,华中科技大学黄剑教授与武汉理工大学左洁副教授团队围绕外肢体机器人(SRL)的通用设计优化、动态控制、人机交互与运动安全监测四大核心难题展开系统攻关,近期在IEEE T-RO、IEEE T-ASE、IEEE-TBME、IEEE-RAL等权威期刊发表系列成果,提出原创性理论框架与技术方案,设计了一种新型的上下肢通用外肢体机器人构型,成功兼顾上肢抓握与下肢行走支撑、坐站位姿转换等多种功能需求,显著提升辅助机器人的适应性、安全性与交互自然度。该设计理论为多功能外肢体机器设计与创成提供了全新思路,为卒中康复与老年助残提供了真正可落地的下一代智能化解决方案。
01研究背景
全球每年新增卒中患者逾1200万,其中约75%遗留不同程度的运动功能障碍,而坐-站转移、步行等日常动作的稳定性下降又使老年跌倒成为65岁以上人群伤害致死的首因。而外肢体在扩展人体工作空间、增强肢体功能方面展现出巨大潜力,既可为健康人群提供功能增强支持,也可为患病群体提供康复训练辅助。然而,现有设计方法仍面临多个关键瓶颈:
首先,上下肢通用设计难度大。传统外肢体系统往往专注于上肢或下肢的单一功能,上肢辅助通常强调灵巧性与柔顺性,而下肢辅助则更注重刚性支撑与稳定性,这两类需求在机构设计和控制策略上存在本质冲突,导致难以实现统一的设计框架。
行走任务中的人机阻抗匹配难以保障。浮基系统在运动过程中受到人体自身动态扰动与外部环境干扰的双重影响,进而造成交互状态的不确定性,使得传统阻抗控制策略难以准确匹配人体运动节奏,限制了系统在自然行走过程中的实用性和稳定性。
由于患侧肌电信号微弱且非平稳,传统固定刚度或简单肌电映射策略难以实现“恰如所需”的外肢体协同助力;如何构建患者个性化肌电-关节刚度映射关系,并在运动过程中持续动态补偿神经-机械延迟,正是本课题组提出sEMG-VSAIC变阻抗控制所必须攻克的瓶颈。
外肢体辅助坐-站的易跌位姿变换过程中稳定性预测与安全防护也面临挑战。由于该动作持续时间短且质心轨迹非周期、支撑面不规则,传统基于步态周期的预测模型难以对这类动作的稳定性以及“即将跌倒”与“可自恢复”的临界点进行准确判定。
02研究概述
基于功能化导电聚合物的设计,研究团队设计了功能化聚苯胺基时序黏附水凝胶贴片。它可以实现心脏的同步机械生理监测和电耦合治疗,并牢固附着在心脏表面监测心脏的机械运动和电活动。
1. 通用多功能外肢体椭球工作空间优化与多目标协同设计
传统外肢体机器人目前面临几个关键挑战:首先,上下肢功能存在割裂,例如上肢的抓取灵活性与下肢的支撑刚性难以兼顾;其次,在多目标优化过程中,高维不规则帕累托前沿易导致算法陷入局部最优,造成整机质量过大(通常超过7公斤),机器人的工作空间与人体实际运动之间不够匹配,并引发人机协同过程中的卡顿问题。团队提出椭球工作空间相似性量化理论与多子群引斥力校正萤火虫算法(MSCFA),构建四目标优化模型(工作空间匹配度、支撑力、质量、惯性矩)。通过最小体积包围椭球描述机器人与人体肢体的位置、姿态、形状及尺寸相似性,计算复杂度较传统点云方法显著降低。MSCFA算法引入吸引域与排斥域策略,收敛速度较NSGA-II提升40%,单次迭代时间缩短至634秒。优化后SRL采用模块化腰部佩戴设计,4自由度串联机构总质量控制在5.0kg,连杆长度配置为[0.1m, 0.4m, 0.29m, 0.21m],实现:抓取任务:健康受试者平均成功率提升7.2%,覆盖自然肢体难以触及区域;行走支撑:小腿肌肉活动降低12.7%,地面反作用力峰值减少11.3%-18.5%。
(1)构建面向上下肢通用功能的优化设计理论:提出一套可复现人体日常上肢与下肢活动的SRL机器人优化设计理论,并在此基础上研制出具有通用化功能的样机系统,实现抓握、行走与坐站转换等多项任务。
图1:通用SRL机器人系统架构的框图概览(图片来自原文)
(2)提出量化表达工作空间相似度的椭球几何量化方法:设计了一种椭球体工作空间表示方法,显著降低了计算复杂度,并可定量提取工作空间特征。此外,引入椭球相似性度量指标,用于精确描述不同工作空间之间的几何关系。
(3)构建基于指标驱动的多目标优化模型:提出融合上下肢工作空间相似度评估的多目标优化模型,并设计多子群校正萤火虫算法(Multi-Subpopulation Correction Firefly Algorithm,MSCFA),实现对高维不规则帕累托前沿的高效、快速求解。
图2 所提MSCFA的示意图:每个小圆圈代表算法中的一个单独萤火虫。圆圈的颜色越深,表示该萤火虫的适应度越高。高适应度的个体将生成一个吸引区域,用深色背景圆圈和虚线表示。相反,低适应度的个体将生成一个排斥区域,用浅色背景圆圈表示。(图片来自原文)
(4)通过仿真与实验验证原型系统有效性:所提出的SRL机器人样机在仿真与实物实验中均表现出良好性能,能够稳定完成上肢抓握、下肢辅助行走以及坐到站立等多项功能任务,验证了设计理论的实际可行性与通用性。
图3:外肢体辅助下实验者完成多功能实验(图片来自原文)
2. 变阻抗自适应控制:浮动基座外肢体机器人动态抗扰控制
浮动基座外肢体机械腿在步行辅助中面临地面冲击、人体运动不确定性等多源扰动,传统固定阻抗控制易导致人机交互“刚性碰撞”或“支撑不足”,严重影响辅助安全性。
团队提出混合位置/力变阻抗控制(VIC)策略:髋关节采用变阻抗控制以适应动态扰动,膝关节采用位置控制跟踪步态轨迹。通过实时稳定性保证阻抗参数生成网络(RSG-IPGN),根据步行阶段动态调制阻抗。实验中,健康受试者穿戴SRL行走时股四头肌活动减少25.1%,轨迹跟踪偏差<2°,优于固定阻抗控制(偏差5°)。
(1)构建基于模型的松耦合动力学框架:针对人体躯干运动引起的内部扰动,本研究建立了人体躯干与外肢体(SRL)之间的松耦合动力学模型,并提出融合浮基状态反馈的混合位置/力控制策略,从而提升内部扰动的观测与补偿能力。
图4:提出的浮基SRL实时控制系统示意图(图片来自原文)
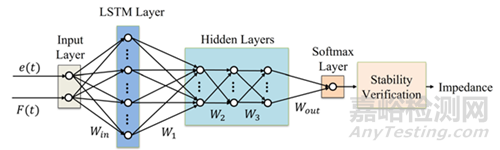
(2)提出状态相关的可变阻抗控制方法:设计了一种状态依赖的可变阻抗控制(Variable Impedance Control,VIC)策略,并构建了一个实时阻抗生成网络,实现了关节阻抗的自适应调节,同时保障控制系统的闭环稳定性。
图5: 可变阻抗生成网络(图片来自原文)
3. 肌电驱动人机协调:适应患者自然运动关节发力的变阻抗控制
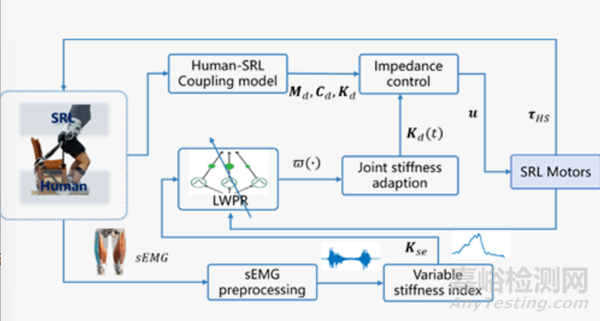
团队提出表面肌电信号(sEMG)驱动的变刚度阻抗控制(sEMG-VSAIC)算法:采集健侧股外侧肌sEMG信号,通过非线性归一化处理(形状因子ς)实时估计关节刚度,作为SRL阻抗调整依据;动态调整惯性、阻尼及刚度等控制参数,接触阶段低阻抗吸收冲击,支撑阶段高阻抗提供刚性支撑;通过局部加权投影回归(LWPR)算法在线优化阻抗参数,校准时间仅需4.3±0.5分钟。
图6 基于sEMG变刚度补偿的SRL人机协调控制算法整体框图(图片来自原文)
图7 在无/有变刚度阻抗优化下的SRL辅助性能对比(图片来自原文)
临床实验中,4名偏瘫患者STS动作时间缩短39.3%,患侧股外侧肌活动降低28.1%,人体质心波动范围缩小16.6%,避免健侧代偿导致的肌肉萎缩风险。
4. KKT优化动态人体稳定性监测:外肢体辅助下易跌位姿动态预测
坐站转移是老年人跌倒高发动作,传统静态稳定性评估(如质心投影)忽视人体运动的动态特性,导致预警滞后(>100ms),穿戴式机器人难以实时响应。团队提出基于KKT优化的Zonotope集员滤波(KKT-ZSMF)算法:
(1)人-外肢体动态稳定性建模:通过Zonotope描述人体质心(COM)的稳定状态集合,融合位置(rx, ry)与速度(vx, vy)约束,覆盖所有成功站立的最终状态集合。
图8 人-SRL耦合模型示意图。(a)人机模型几何示意图 (b)人和SRL的独立模型(图片来自原文)
(2)人体动态稳定区间实时优化:利用KKT条件将Zonotope转换为Polytope并求解凸包,实时迭代优化稳定区间的边界,单次迭代时间最长仅为7.91ms。
图9 面向外肢体防护辅助的易跌位姿失稳动态预测算法框图(图片来自原文)
(3)临床验证:8名健康受试者跌倒预测准确率达93.49%,较GD-ZSMF提升22.34%;5名老年人实验显示,算法对高风险人群(步速<0.6m/s)的稳定状态识别灵敏度达100%。
5. 健康人与偏瘫病人肢体运动辅助实验验证(可贴视频附件)
为验证所设计外肢体机器人辅助功能的有效性能,在华中科技大学同济医学院附属协和医院康复科医生指导下,招募偏瘫患者分别进行了辅助抓握、辅助行走、辅助起坐三个功能测试。
图10 偏瘫患者参与SRL 抓取功能测试(图片来自原文)
图11 健康人参与行走辅助任务功能测试(图片来自原文)
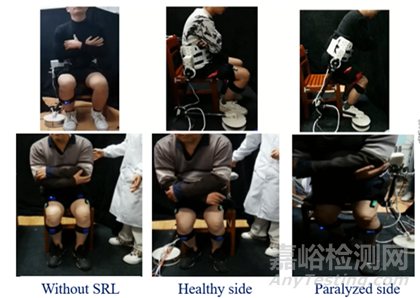
图12 健康人与偏瘫患者参与坐站转换任务功能测试(图片来自原文)
03研究意义
本课题组通过结构设计、动态控制、人机协同与安全感知四个方向的协同创新工作,系统性推动外肢体机器人从实验室原型迈向临床转化与日常应用,科研突破与社会价值显著。团队首次建立兼顾上下肢功能的SRL设计框架,提出的椭球相似性指标为可穿戴机器人提供通用量化标准,并突破了浮动基座机器人动态稳定性控制难题;另外,基于sEMG 的关节阻抗映射与增量学习的变阻抗控制,实现了偏瘫患者主导的快速个性化辅助;而所提出的 KKT-ZSMF动态稳定性预测算法,能为坐-站等短时非周期动作提供低延时实时跌倒预警,从而有效保障外肢体辅助的安全性。相关成果既开创了外肢体机器人相关新理论与新方法,也积极响应了我国卒中康复与老龄化社会助老助残的迫切需求,轻量化、多功能外肢体构型为未来开展大规模临床验证、家庭康复部署及产业化落地奠定了坚实的技术与应用基础。
参考文献:
[1] J. Huo, J Huang*, J. Zuo*, B. Yang, Z. Fu, X. Li, Samer Mohammed, “Innovative Design of Multifunctional Supernumerary Robotic Limbs With Ellipsoid Workspace Optimization”, IEEE Transactions on Robotics, vol. 41, pp. 4699-4718, 2025.
[2] J. Huo, Kehan Xu, Chengyao Li, Yu Cao, Jie Zuo, Xinxing Chen*, Jian Huang*, “Variable Impedance Control for Floating-Base Supernumerary Robotic Leg in Walking Assistance,” IEEE Robotics and Automation Letters, vol. 10, no. 9, pp. 8698-8705, 2025.
[3] J. Zuo, J. Huo, X. Xiao, Z. Zhang, J. Huang*, “Human-robot Coordination Control for Sit-to-Stand Assistance in Hemiparetic Patients with Supernumerary Robotic Leg”, IEEE Transactions on Automation Science and Engineering, vol. 22, pp. 16591-16602, 2025.
[4] J. Zuo, B. Yang, X. Xiao, C. Sun, J. Huang*, “Online Monitoring for Human Sit-to-Stand Movement Based on Karush-Kuhn-Tucker Optimized Zonotope Set-Membership Filter,” IEEE Transactions on Biomedical Engineering, vol. 71, no. 3, pp. 758-771, 2024.
来源:Internet
关键词:
上下肢
外肢体机器人