嘉峪检测网 2025-05-23 15:23
导读:本文介绍了手术机器人的核心组成与技术基础。
近年来,手术机器人已成为医疗领域的革命性技术,从心脏搭桥到肿瘤切除,从骨科手术到神经介入,其应用场景不断拓展。不免让人好奇:这些“机械医生”是如何工作的?它们由哪些核心部件构成?背后又依赖哪些关键技术?
手术机器人的“身体”:四大核心组件
如果把手术机器人比作人体,它的“肢体”“眼睛”“大脑”和“神经系统”缺一不可。
1. 操作控制台——机器人的“大脑”
这是医生与机器交互的核心平台。医生坐在控制台前,通过双目镜观察3D高清影像,双手操控两个主手控制器。这些手柄能捕捉0.1毫米级的手部动作,并通过运动缩放技术(例如医生移动1厘米,机械臂仅移动1毫米)提升操作精度。
触觉反馈系统:新一代机器人在手柄中加入力反馈,当器械触碰到血管时,医生能感受到轻微阻力。
语音控制模块:医生可通过指令切换器械或调整视野,例如说出“放大两倍”,镜头会自动拉近目标区域。
2. 机械臂系统——机器人的“双手”
机械臂是直接接触患者的部分,每条臂拥有47个自由度,远超人类手腕的灵活性。以达芬奇的EndoWrist®器械为例,其腕部可540°旋转,在狭小空间(如胸腔)完成缝合、打结等高难度动作。
材料选择:钛合金框架确保轻量化,表面覆盖医用级硅胶,耐受高温高压灭菌。
模块化设计:采用分体式机械臂,可根据手术需求快速更换持针器、电凝钩等工具。
3. 成像系统——机器人的“眼睛”
传统腹腔镜的2D画面常让医生难以判断组织层次,而手术机器人的成像系统实现了三大突破:
3D立体视觉:双摄像头模拟人眼视角,10-15倍放大效果让毛细血管清晰可见。
荧光导航:注射吲哚菁绿(ICG)后,达芬奇Firefly模式可显示血管灌注情况,实时判断组织活性。
影像融合:术前CT/MRI数据与术中画面叠加,在肺段切除手术中精准定位肿瘤边界。 IMG_256
4. 动力与传感系统——机器人的“心脏与神经”
纳米级伺服电机:驱动机械臂运动的“肌肉”,响应延迟小于100毫秒。
多模态传感器:力传感器检测器械与组织的接触力(精度达0.1牛),温度传感器防止电凝过热损伤。
安全冗余设计:当多个传感器数据冲突时,系统会自动停机,避免误操作。
技术基石:五大核心科技
手术机器人并非简单机械,而是多学科技术的集大成者。
1. 精密运动控制技术
主从控制算法:将医生手部动作转化为机械臂运动,并过滤生理性震颤。在神经外科手术中,这项技术能将操作误差控制在0.5毫米以内。
虚拟围栏技术:设定解剖禁区(如视神经区域),一旦器械接近,系统会通过阻力反馈提醒医生。

2. 多模态影像融合
实时配准技术:将术前CT的3D模型与术中内窥镜画面对齐,误差小于2毫米。通过此技术,实现螺钉植入角度偏差小于1°。
AI增强现实:可自动识别输尿管、肠系膜动脉等结构,并用彩色轮廓标注风险区域。
3. 人机交互优化
眼动追踪:医生注视屏幕某区域时,镜头会自动聚焦。
手势控制:在无菌环境下,医生可通过手势切换器械,避免触碰污染风险。
4. 人工智能与大数据
手术路径规划:基于数千例手术数据,AI可推荐最佳手术方案。例如在肝癌切除中,系统能预测血管变异概率,降低术中出血风险。
自动化操作:实验阶段的缝合机器人能在猪肠吻合术中自主完成80%的缝合步骤。
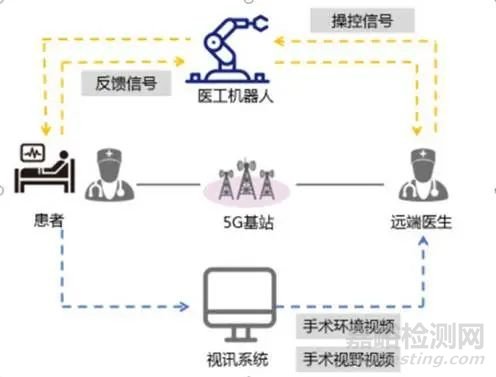
5. 5G远程手术网络
超低延迟传输:通过5G网络,医生远程操控机器人完成手术,信号延迟仅28毫秒。
云端手术库:全球医生可上传手术视频,AI分析后生成标准化操作指南。
挑战与未来:从“工具”到“伙伴”
尽管技术突飞猛进,手术机器人仍面临三大瓶颈:
1. 触觉反馈缺失:现有系统无法传递组织弹性、黏度等触觉信息,医生依赖视觉补偿。
2. 应急能力不足:遇到大出血等突发状况时,机器人切换手动模式需20秒以上。
3. 成本高昂:例如达芬奇单台设备约2500万元,每次手术耗材费35万元。
未来十年,技术突破的三个方向:
微型化:胶囊机器人(如EndoBRAIN)可经消化道进入体内,完成早期胃癌切除。
群体协作:多台机器人分工合作——机械臂切除肿瘤,无人机实时送检病理样本。
生物混合材料:可降解机械臂临时支撑受损器官,术后自动吸收,避免二次取出手术。
从“精准操作工具”到“智能手术伙伴”,手术机器人的进化始终围绕一个核心目标:让复杂手术更安全,让简单手术更高效。随着AI、材料、通信技术的融合,未来的手术室或将形成“人类决策+机器执行”的全新模式——医生专注于战略判断,机器人负责战术操作,共同为患者提供最优治疗方案。
来源:Internet
关键词: 手术机器人