嘉峪检测网 2024-05-15 12:47
导读:本文的第一部分着眼于综述超声医疗手持件的一般结构、设计变体和系统设计。之后的第二部分将对驱动器的设计、特殊应用、驱动电子设备和故障机制进行探寻。
为了防止手持件在手术过程中过热,高机械等级的低损耗压电材料登上了手术台。

超声波手持件包括超声波手术刀、超声乳化手术刀和波刮器,它们利用声波协助切割软/硬组织。(图片来源:Physik Instrumente)
超声波手术刀在医疗方面的应用频率越来越高,比如会用在微创外科手术和牙科手术中。超声波手术刀、超声乳化手术刀和波刮器等仪器均利用声波协助切割软/硬组织。本文的第一部分着眼于综述超声医疗手持件的一般结构、设计变体和系统设计。之后的第二部分将对驱动器的设计、特殊应用、驱动电子设备和故障机制进行探寻。
1、定向发热
骨头或牙齿之类的硬组织可以用钻头或牙钻来处理,比如在口腔手术时。这种情况下,超声波可辅助冲击或空化,协助机械工作。选定合适的工作频率后,可以更快、更针对性地处理组织,比如可以在保护好周边血管后进行。作用于肌肉等软组织时,靶向超声波能使得手术刀的刀片以非常高的频率,按特定的方式振荡。
手术器械摩擦组织时会生成热量,靶向发热则有助于快速切割组织并凝血(见图1),从而防止大出血并促进止血。对手术器械的接触点施加高密度能量后,由于所需的机械力和压力较低,手术或活检时的切割也会更加容易。手术切口更小,对周围组织的创伤也更少,从而可减少术后疼痛,并缩短伤口的愈合时间,改善患者的愈后恢复。
此外,超声波器械可借助空化作用和声波的力量,将牙垢或肾结石等坚硬的结块轻轻敲碎。软组织结构也可以通过靶向和微创的方式进行液化和抽吸,比如在白内障手术(超声乳化术)或伤口清创术中。

用于软组织解剖和凝结的超声波手持件(图片来源:Physik Instrumente)
这种基于压电陶瓷的超声波手持件通常称作波刮器。现代波刮器通常包含一个工具和若干附加功能组件,如灯、冷却用水、供气和抽吸组件,这些功能可以集成到手持件中,并根据需要选择打开和关闭。超声波刮器的典型应用包括:
· 超声波手术刀和组织封闭工具,例如用于血管手术中的凝血;
· 腹腔镜超声解剖;
· 骨钻和骨锯,用于骨科和颌面外科;
· 去除牙垢;
· 体内碎石;
· 眼科超声乳化术;
· 超声辅助伤口清创术;
对于大规模的硬组织医疗手术,可以用旋转工具(如螺旋钻)作为替代方案。为了更快地移除组织,并减少对周围组织的创伤,可以添加超声系统来提供协助。
2、一般结构
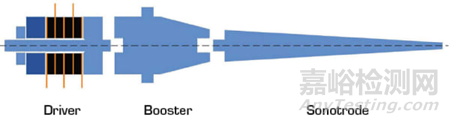
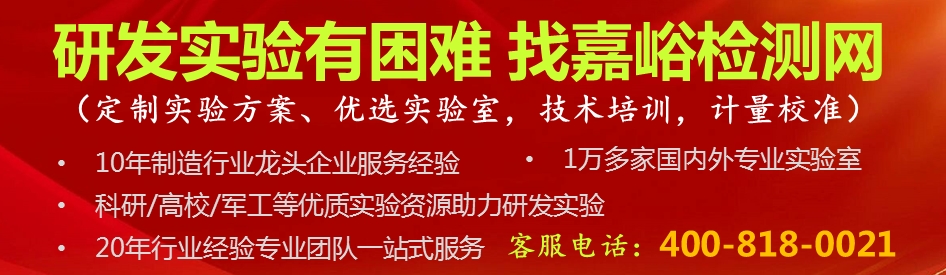
图1:波刮器的结构包含三个组件:压电驱动器、增幅器和超声波发生器。
波刮器是手持式、模块化的超声波传感器,通常包含驱动器、增幅器和超声波发生器(见图1)。驱动器也被称为转换器,负责产生超声波,通常由两个或四个拧在一起的压电陶瓷环组成。为了防止机头在操作期间过热,产品选用高机械等级的低损耗压电材料,如PIC144、PIC184或PIC181,组成特别适合高功率超声波应用的“硬”压电陶瓷组。
增幅器既可用作机械放大器,也可用作悬挂装置。增幅由悬架两侧增幅器的体积比决定。悬架安装位置由增幅器振动的中性水平所决定。

图2:波刮器中的节点位置和超声波振幅。
手持件的超声波发生器(扬声器)将超声波传输到工具的尖端,因此工具接触面的振幅肯定是最大的。超声波发生器还用作振幅的机械放大器(见图2)。增幅是根据超声波发生器两端的横截面积比来计算的。临床中需要的工作频率范围是20-100kHz,整个波刮器的几何形状也会相应地设计成半波长的倍数。

用于超声波手持件的硬质PZT多层环形芯片。(图片来源:PI)
这种设计能让工具达到最大振幅。不同的组织需要的频率不同:例如,骨骼组织最佳的手术振幅是20-25kHz,而软组织的最佳手术振幅是60kHz左右。
金属部件方面,我们采用极高等级的合金,将机械损耗降到最低,通常会采用钛、铝合金或钢合金。实际选择的材料取决于应用的要求,比如波刮器所需的重量和预算成本。此外,各种涂层(如TiN)也将用于防止腐蚀或过敏反应。
3、设计变体
对于无需改变波刮器增幅或改变工作频率的应用案例,可以将驱动器和增幅器单独组合成一个组件。商用的波刮器支持按需更换工具——一台波刮器可以用于多个应用场合。应当注意的是,这些工具必须与各自标度的工作频率精确匹配,以呈现最佳手术效果。
图3:带有角度的超声波发生器以及螺旋超声波发生器波刮
在特殊应用中,可能还需要非轴向的振动。为了钻入致密的骨骼组织,扭转振动会更有效;在锯切软骨组织时,则需要横向振动(见图3)。因此,只需对设计稍作调整,就可以优化波刮器的功能,最大限度避免其他组织受损。
4、系统设计
有限元法(FEM)模型可用于预先对高功率超声波传感器进行整体的设计模拟。在设计新的波刮器时,必须考虑几个关键的属性:
· 最佳工作频率;
· 振幅;
· 工作温度/冷却;
· 振动模式。
工作频率主要由组织的机械特性以及手术类型决定(见表1)。

表1:用于组织手术的典型超声频率。
最大的输入可用功率、工具材料的强度和治疗组织的极限、机头的最大振幅。机头的主动冷却程度也很重要,通常情况下,不间断手术要求必须具备此性能。

图4:波刮器的超声增幅器
在模块化的波刮器中,工具的振幅首先根据驱动器的谐振振幅,以及增幅器和超声波发生器的倍增因子进行估算(见图4)。然而,这种做法过于简单,在医疗应用中,我们应当始终通过FEM模拟的方式进行验证。根据应用情况对刀尖的振动模式进行针对性调整,可以改善治疗过程。例如:通过使用扭转振动,可以更快地进行骨骼活检,并减少对周围组织的损伤。

表2:针对不同组织治疗时的超声振动模式。
振动模式的调整(见表2):在最简单的情况下,通过修改刀头(如弯曲角度)就可以实现对振动模式的调整;最复杂的情况下,可通过调整传感器、增幅器和超声波发生器的设计来实现。核心设计因素包括最大应变区域、温度控制以及精确定位波刮器的振动节点。
从微创外科手术到牙科手术,超声波手持件广泛用于各种应用。
之后在第二部分,我们将探究驱动器的设计、特殊应用、驱动电子设备和故障机制。本文对超声医疗手持件的一般结构和系统设计进行了阐述。在第二部分,我们将探究驱动器设计、特殊应用、驱动电子设备和故障机制。
来源:MDDI
来源:Medtec医疗器械设计与制造